V
主页
京东 11.11 红包
IROS 2023 讲座 —— 从基于模型的全身控制到利用 ML 进行足式人形机器人操作
发布人
Luis Sentis 的演讲 IROS 2023 Reactive and Predictive Humanoid Whole-Body Control 研讨会。研讨会由张天蔚、Emel Demircan、顾彦和王玉泉组织。https://ieee-iros.org/workshops-tutor...
打开封面
下载高清视频
观看高清视频
视频下载器
UIUC 机器人讲座 —— 机器人学习:通过理解第一视角视频(Robot Learning by Understanding Egocentric Video)
【中英字幕】强化学习和模型预测控制18讲!四大名校教授精讲模型预测控制、最优控制、强化学习入门
MPC+强化学习!Actor Critic模型预测控制,苏黎世大牛教授人类水平性能的自主视觉无人机演讲
实时最优控制讲座 —— TrajectoryOptimization.jl 教程
CMU 机器人讲座 —— 构建适应性强的通用机器人
UC 伯克利机器人讲座 —— 从状态空间控制到智能机器
ETHZ 研究 —— 四足机器人深度柔顺运动控制
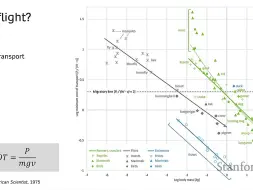
斯坦福机器人讲座 - Flying Robots Exploring Hybrid Locomotion and Physical Interaction
2024 斯坦福 凸优化教程 Stephen Boyd 第 6 讲
斯坦福大学 Khatib 讲座 —— 深海机器人探索
MIT 机器人讲座 —— MuJoCo MPC (MJPC) 介绍
CoRL 讲座 —— 用于机器人的预训练模型
SkiROS2 - 基于技能操作的 ROS 机器人控制平台
密歇根大学机器人讲座 —— 动力学和控制学习的一些基本限制
ETH + Oxford 四足机器人研究 —— 野外视觉导航的快速可穿越性估计
EPFL 机器人研究 —— 视觉CPG-RL: 学习视觉引导的四足机器人运动CPG(ICRA 2024)
机器人讲座 —— 大行为模型 - 基于监督学习的机器人灵巧操作
密歇根大学机器人讲座 —— 机器人学中的高效通用算法
控制频率对基于深度 RL 的双足机器人运动扭矩控制器的影响
CoRL 讲座 - 基于仿真学习的具身智能
实时最优控制讲座 —— OCS2 教程
类 Sora 机器人基础模型 RFM-1:理解物理的世界模型
ETHZ 四足机器人研究 —— 学习具有风险意识的运动(ICRA 2024)
CoRL 机器人讲座 —— 通向通用机器人之路
ETH 讲座 —— 机器人的感知和学习:ML 最佳实践项目
CMU 最优控制 2024 助教补充 第 5 讲 动态规划与 MPC
CoRL 讲座 Scott Kuindersma - 基于模型的控制有助于学习
深度无监督学习 UC 伯克利 第 4 讲 潜变量模型与变分自编码器
宾大机器人讲座 —— 多接触操作中的学习与控制
宾大 GRASP 机器人讲座 —— 利用视听基础模型反思视听发展
CMU 最优控制 2024 第 7 讲 线性二次调节器的三种方法
斯坦福机器人讲座 —— 大规模预训练模型时代的 机器人学习
密西根大学机器人讲座 —— 多接触碰撞中的平稳性
CoRL 讲座 Russ Tedrake - 从鲁棒控制到基础模型,对鲁棒性的看法多种多样
ETHZ ROS 教程 第 1 讲 ROS 简介
IEEE 机器人讲座 —— MuJoCo MPC (MJPC)介绍
MIT 欠驱动机器人学 2024 第11 讲 轨迹优化 II
MIT 欠驱动机器人学 2024 第 7 讲 Lyapunov Analysis I
斯坦福 AI 讲座 —— 大语言模型(LLM)的涌现能力(Emergent Abilities)是幻觉吗?
USC 2024 机器人基础 第 17 讲 基于采样的运动规划 I