V
主页
CMU 最优控制 2024 助教补充 第 5 讲 动态规划与 MPC
发布人
https://optimalcontrol.ri.cmu.edu/rec... 00:00 intro 00:47 Bellman's principle of optimality 04:40 dynamic programming 07:23 DP for LQR 33:27 MPC 45:00 quadrotor MPC example
打开封面
下载高清视频
观看高清视频
视频下载器
CMU 最优控制 2024 第一讲
ETH + NVIDIA 研究 —— Orbit: 交互式机器人学习环境的统一仿真框架
斯坦福大学开源 - 机器人技能学习 通用操作接口 UMI (Universal Manipulation Interface) Demo
legged control 成功部署在A1
USC 四足机器人研究 —— 通过 RL 增强 MPC 学习敏捷运动和敏捷行为
斯坦福开源 - 机器人技能学习 通用接口UMI - 机械夹爪装配教程
ETH + Oxford 四足机器人研究 —— 野外视觉导航的快速可穿越性估计
[IROS 2024] 通过分布式优化加速腿式机器人的模型预测控制
PACC:使用 MPC 的四足机器人高负载协作搬运被动臂方法
教程:使用 CVXPY 进行凸优化 - SciPy 2022
CMU 机器人讲座 —— 模仿学习(IRL)与从人类反馈中学习(RLHF)
意大利 IIT 讲座 —— 结合学习和模型预测控制的机器人安全控制
CMU 最优控制 2024 第 9 讲 凸 MPC
MuJoCo MPC 应用示例:人形机器人跟踪
永磁同步对拖电机Simulink控制—MPC(模型预测控制)算法讲解与实践
斯坦福开源 - 机器人技能学习 通用接口UMI - 机械夹爪 3D 打印教程
PACC:一种使用 MPC 与四足机器人进行高负载协作搬运的被动臂方法
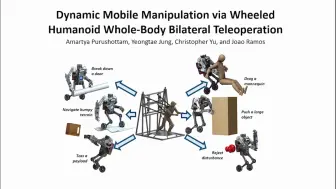
通过轮式仿人机器人的全身遥操作实现动态移动操纵
CMU 最优控制 2024 第 3 讲 Optimization Pt 1
MIT 机器人讲座 —— MuJoCo MPC (MJPC) 介绍
把高冷型性格的机器人放在人群中测试它的功能和反应和性能,目前一切正常,不会有攻击行为。差不多算是合格了。
ETHZ 研究 —— 四足机器人深度柔顺运动控制
IROS'24 普渡大学、麻省理工学院 | 5自由度触觉夹持器,性能匹敌仿生手,实现高效精确操控
CMU 最优控制 2024 第 10 讲 非线性轨迹优化
强化学习论文分享20240808
ICRA 2019 轮式四足机器人的全身运动控制与规划
开源人形机器人强化学习训练框架!星动纪元联合清华大学、上海期智研究院发布Humanoid-Gym
【运筹学150】每日一练:(Day82)考研运筹学计算题——动态规划-非线性规划数学模型
CMU 最优控制 2024 第 1 讲
CMU 最优控制 2024 第 11 讲 Differential Dynamic Programming(DDP)
IEEE 机器人讲座 —— MuJoCo MPC (MJPC)介绍
2024 斯坦福 凸优化教程 Stephen Boyd 第一讲
【强化学习玩游戏】简单易懂的PPO算法及公式推导!强化学习轮足机器人控制器、月球登陆器训练+超级马里奥项目实战!
CMU 最优控制 2024 助教补充 第 8 讲
终于玩上了!在Isaac实现unitree H1的运动仿真
【运筹学150】每日一练:(Day87)考研运筹学计算题——动态规划-二维数学模型
CMU 机器人讲座 —— 面向大规模多智能体的智能规划(移动机器人,无人机)
CMU 最优控制 2024 第 4 讲 Optimization Pt 2
CMU 最优控制 2024 第 13 讲 Dealing with 3D Rotations
波士顿动力 Atlas 应用 —— 手持消防水带穿过舱门