V
主页
ETHZ ROS 教程 第 1 讲 ROS 简介
发布人
In the first of five lectures, we will introduce the ROS architecture & philosophy; ROS master, nodes, and topics; Console commands; Catkin workspace and build system; Launch-files and the Gazebo simulator.
打开封面
下载高清视频
观看高清视频
视频下载器
Mirobot_ROS_01介绍_1
实时最优控制讲座 —— Crocoddyl 教程
教程:使用 CVXPY 进行凸优化 - SciPy 2022
用 ROS 2 在 Isaac Sim 中驾驶自主移动机器人
[ ETH RSL ] mANYpulator – 移动操纵 (Martin Wermelinger)
IROS 2023 基于模型的多接触操作
MATLAB - 使用 RRT 算法路径规划(官方出品)
CMU 最优控制 2024 第 10 讲 非线性轨迹优化
2024世界机器人大会现场,开上“高达”了~
斯坦福开源 - 机器人技能学习 通用接口UMI - 机械夹爪 3D 打印教程
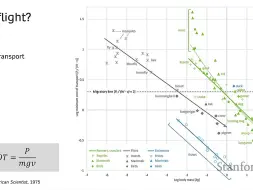
斯坦福机器人讲座 - Flying Robots Exploring Hybrid Locomotion and Physical Interaction
MIT 欠驱动机器人学 2024 第 6 讲 动态规划 III
实时最优控制讲座 —— OCS2 教程
实时最优控制讲座 —— 最优控制机器人软件
CMU 最优控制 2024 第 17 讲 迭代学习控制(Iterative Learning Control)
MATLAB - Understanding Kalman Filters 官方出品
CMU 最优控制 2024 助教补充 第6讲 轨迹优化
CMU 最优控制 2024 助教补充 第 7 讲
ROS2 Actions [1H Crash Course]
MATLAB - Robust Control(鲁棒控制) 官方出品
CppCon 2023 讲座 —— 利用 C++ 和 ROS 实现仿真器、传感器数据和算法
CoRL 讲座 —— 用于机器人的预训练模型
CMU 最优控制 2024 第 13 讲 Dealing with 3D Rotations
USC 2024 机器人基础 第 18 讲 基于采样的运动规划 II
MATLAB - 传感器融合和跟踪 官方出品
斯坦福机器人讲座 —— 大规模预训练模型时代的 机器人学习
MIT 欠驱动机器人学 2024 第11 讲 轨迹优化 II
MIT 欠驱动机器人学 2024 第12 讲 轨迹稳定 I
斯坦福机器人讲座 —— 推动机器人技术在现实世界中的应用
CMU 最优控制 2024 助教补充 第 1 讲 ODE 与线性化
CoRL 辩论 —— 扩大规模是否足以部署通用机器人?
深度无监督学习 UC 伯克利 第 4 讲 潜变量模型与变分自编码器
斯坦福大学开源 - 机器人技能学习 通用操作接口 UMI (Universal Manipulation Interface) Demo
MIT 欠驱动机器人学 2024 第 4 讲 动态规划 II
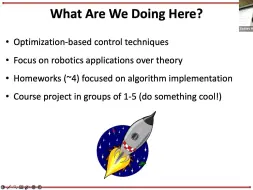
CMU 最优控制 2024 第 1 讲
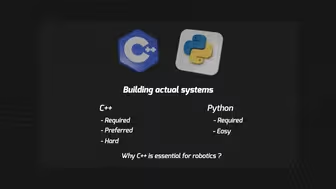
为什么使用 C++ 编写机器人程序?
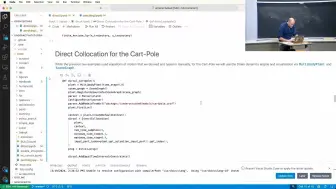
MIT 欠驱动机器人学 2024 第 10 讲 Trajectory Optimization I
CMU 最优控制 2024 第 11 讲 Differential Dynamic Programming(DDP)
西北大学机器人讲座 —— 机器人学习的控制原理
人形机器人控制及仿真