V
主页
CoRL 2020, Spotlight Talk 130_ Motion Planner Augmented RL
发布人
https://www.youtube.com/watch?v=cRIe522qdtA
打开封面
下载高清视频
观看高清视频
视频下载器
乐高-球形机器人
PyRoboLearn_ create an inverted pendulum RL environment from scratc
DARPA 机器人地下挑战赛
乐高 爬墙车
Overcoming sparse rewards in Deep RL
强化学习 四足
做的很棒的几款飞行机器人
Experimental Wave Drive
美国 DARPA 2020 机器人相关研究
乐高多轮障碍攀爬车
没有线的风筝,照样飞!!!
A Reinforcement Learning-based Framework for 机器人技能
TD3 Reinforcement Learning On Bipedal Robot
ros+openai(5)基础1
V-Coptr Falcon 摆臂双旋翼
MIT的变形机器人
Real-time Active Vision for a Humanoid Soccer Robot Using DRL
ROS+OpenAI(14)gazebo物理参数
Reinforcement Learning for Real-World Robots
力矩陀螺 自平衡装置
arduino官方自平衡自行车资料解读(5)理论-仿真-实践
最具影响力科技汇总 2020-2021 看看有哪些是你已经知道的
Walking Position Commanded NAO Robot
RL vs MPC,LeCun:MPC,胜!我不看好强化学习
强化学习在lego上的部署
Gazebo中的板球平衡系统
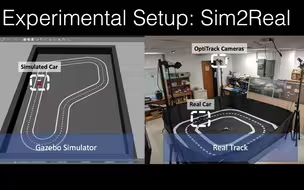
Sim2Real Transfer_ Time-in-State Deep Reinforcement Learning
如何快速低成本开展机器人项目
反作用轮与力矩陀螺的区别。。
螺旋桨平衡机器人 Balancing with propellers
轮式机器人越障力学分析
Dynamixel ROS motion capture robot using Raspberry pi and wifi_57Vo
matlab动力学建模与simscape验证
ROS+OpenAI(10)基础6-ROS时间
强化学习 之 机器人穿T恤
Dynamixel Tutorial _ How to control the Dynamixel Ax12 Motor using
球形机器人 SLAM
ROS2 QA 214 How to Install TurtleBot3 packages on ROS2
ROS+OpenAI(15)ROS-control
基于Q-learning求解机器人路径规划问题