V
主页
京东 11.11 红包
ROS+OpenAI(10)基础6-ROS时间
发布人
rospy中与时间相关的函数演示。谢谢观看!
打开封面
下载高清视频
观看高清视频
视频下载器
ros+openai(6)基础2
ROS+OpenAI(7)基础3-“服务”
ROS+OpenAI(14)gazebo物理参数
ROS+OpenAI(13)urdf进阶-xacro
ros+openai(3)本地安装
Reinforcement Learning for Real-World Robots
ROS+OpenAI(3-3)基于python3的DQN用于Cube机器人
ROS+OpenAI(9)基础5-树莓派与虚拟机的ROS通信
用ROS搭建一台自平衡机器人
ros+openai(4)urdf快速了解
搞懂滚动摩擦
ROS+OPENAI(4-4)多机器人简单示例
【开源教程】ROS基础例程详解
强化学习在lego上的部署
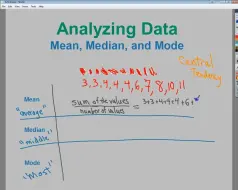
数据分析基础
ROS控制 | 第一轮导航代码讲解
ROS多线程 与 Linux进程(2)
TensorFlow 教程#16 强化学习
ROS控制 | 第一轮控制功能包讲解
万字解析OpenAI o1(上)模型与脉络
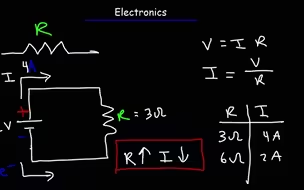
电子基础【小白看】
Dynamic Programming _ 广义策略迭代
200元显卡大战Qwen2.5-32B,垃圾佬也想跑本地大模型,P104双卡Linux下Ollama跑Local LLM
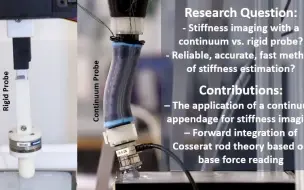
连续介质刚度成像
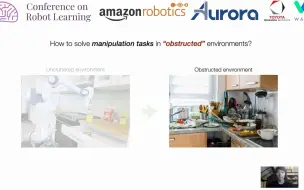
CoRL 2020, Spotlight Talk 130_ Motion Planner Augmented RL
机械臂 强化学习 平衡一个球
国外小组讨论-强化学习的AC架构
PyRoboLearn_ create an inverted pendulum RL environment from scratc
【开源教程】ROS+PX4开源机械臂控制(下)
240927智慧社区第一期ROS培训
Using Optimal Value Functions to Get Optimal Policies
用这个去打保龄球,每把都是满分
PyRoboLearn_ Create a world and load various objects
第3.1集-软件准备-概述
纯机械实现的 谐波分析仪
CoRL 2020, Spotlight Talk 44_ 先验技能加速强化学习
如何处理树莓派 实时进程
一个视频搞懂谐波减速器,学机器人必备
组装一台3D打印机
ITNG 2019 - An Architecture to Connect the Dynamixel AX-12A to the