V
主页
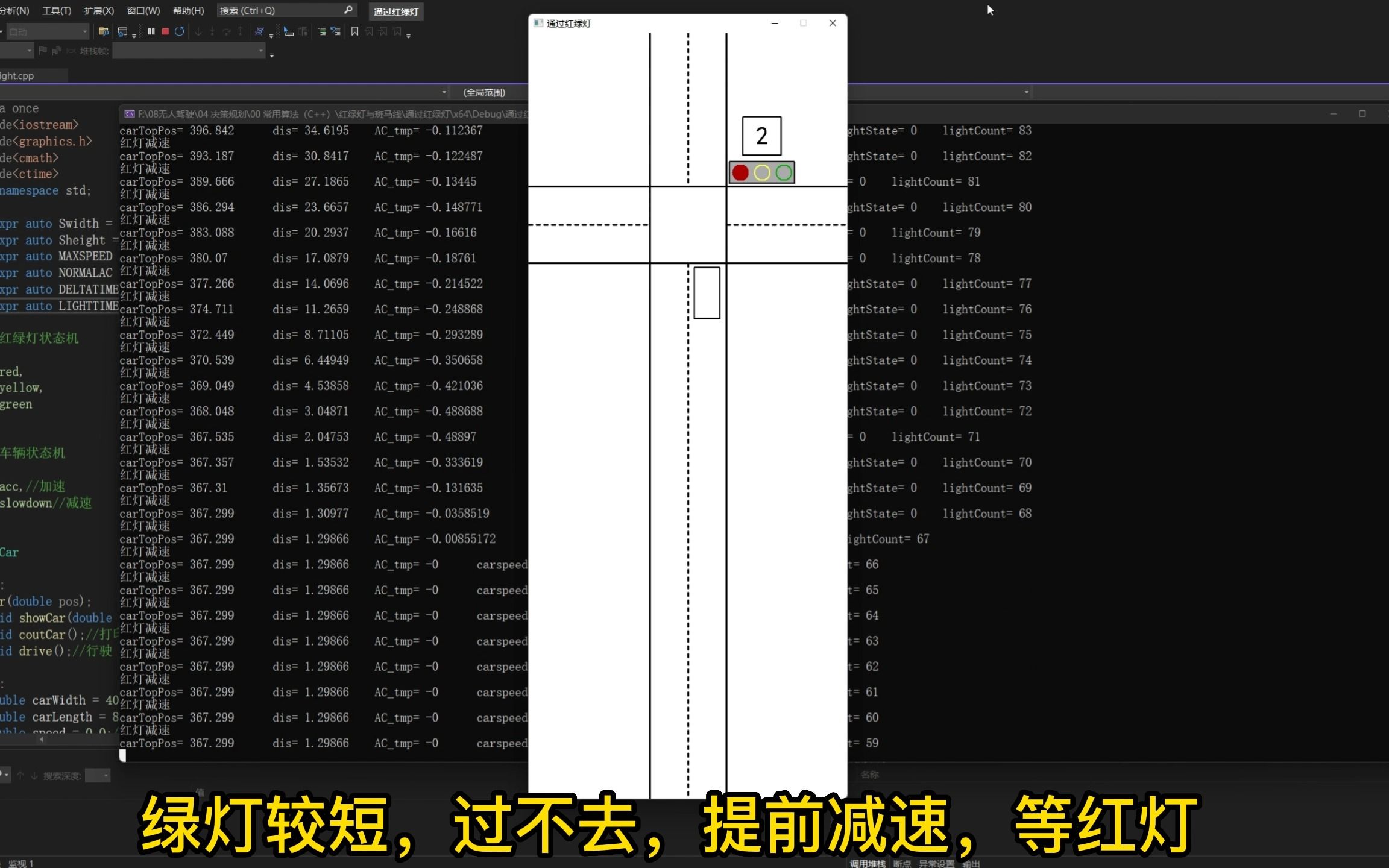
【决策规划算法】通过红绿灯(C++)
发布人
我用C++写的无人车通过红绿灯算法,基于easyX库输出图形; 本算法只涉及到纵向运动,所以轨迹是条直线,不涉及较复杂的轨迹规划,而更注重速度规划; 本算法只涉及规划,只是给出规划出的轨迹和速度,不涉及控制、动力学; 本算法只用于娱乐,真实的无人驾驶比这复杂得多,但本算法对真实的无人车仍有参考意义。 开发心得已更新至这篇文章:https://zhuanlan.zhihu.com/p/567550506
打开封面
下载高清视频
观看高清视频
视频下载器
【决策规划算法】五次多项式曲线插值算法(C++)
【决策规划算法】人工势场算法(C++)
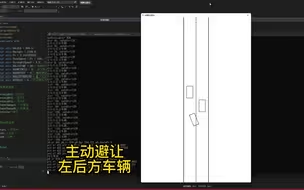
【决策规划算法】超车与绕障(C++)
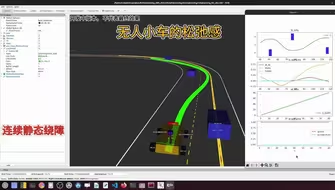
《基于ROS2的决策规划算法工程》动态避障演示 无人小车的松弛感
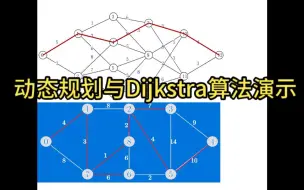
【决策规划算法】动态规划与Dijkstra算法(C++)
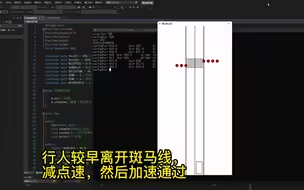
【决策规划算法】通过斑马线(C++)
Carla+ROS2联合仿真测试,像玩极品飞车一样
【Apollo调试】绕障与跟车测试
【C++自制程序】 回溯算法暴力解决世界上最难的数独
【决策规划算法】自动泊车算法(C++)
【Apollo调试】自动泊车调试:有停车位、倒车入库
【决策规划算法】贝塞尔曲线(C++)
【决策规划算法】Astar、Dijkstra、BestFS算法对比演示(C++)
A星算法网上有免费资源,为什么我还要出一门课?
【保姆级】跟着代码学Apollo决策规划 Routing模块5:拓扑地图创建主流程
Astar算法三种类型距离效果演示
【Apollo调试】安装完成,开始调试(基于WSL2)
不是,你不要这么稳啊,我算法还没写完~
【Apollo调试】红绿灯场景调试(自动驾驶仿真)
【保姆级】跟着代码学Apollo决策规划 Routing模块7:U型弯的判断
【自动驾驶技术】花18000大价钱买的无人驾驶课程,从入门到提升的自动驾驶算法——感知实战、视觉定位、预测系统、路径规划、控制理论、强化学习
萝卜快跑火了,那自动驾驶算法工程师会吃香吗?
A星算法很简单吗?
学A星算法 这门课就够了!
【保姆级】跟着代码学Apollo决策规划 Routing模块6:平面向量的基本概念
【保姆级】跟着代码学Apollo决策规划 Routing模块3:接口的数据结构
【保姆级】跟着代码学Apollo决策规划 Routing模块1:操作演示
Apollo9.0安装bug解决 - 编译代码演示
【Apollo调试】DreamView仿真测试(基于原生Ubuntu20.04)
【保姆级】跟着代码学Apollo决策规划 Routing模块2:运行机制
【保姆级】跟着代码学Apollo决策规划 Routing模块9:智能指针简介
【保姆级】跟着代码学Apollo决策规划 绪论2:自动驾驶行业概述
C++初学者不妨试试这个项目
【Linux+vscode+cmake实战系列】Linux下Matplot++快速使用指南
【无人驾驶 全段地上】北京地铁燕房线 阎村东→燕山 后方展望POV
【保姆级】跟着代码学Apollo决策规划 Routing模块4:routing主流程和文件结构
挑战用C++复现李峋同款“跳动的心”
【保姆级】跟着代码学Apollo决策规划 Routing模块10:互斥锁、常量指针与指针常量
【保姆级】跟着代码学Apollo决策规划 Routing模块8:多态的用法
到底是规划算法还是规控算法?生在这个时代 很多事情身不由己