V
主页
【决策规划算法】通过斑马线(C++)
发布人
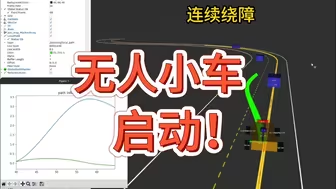
我用C++写的无人车通过斑马线算法,基于easyX库输出图形; 本算法只涉及到纵向运动,所以轨迹是条直线,不涉及较复杂的轨迹规划,而更注重速度规划; 本算法只涉及规划,只是给出规划出的轨迹和速度,不涉及控制、动力学; 本算法只用于娱乐,真实的无人驾驶比这复杂得多,但本算法对真实的无人车仍有参考意义。 开发心得已更新至这篇文章:https://zhuanlan.zhihu.com/p/567562466
打开封面
下载高清视频
观看高清视频
视频下载器
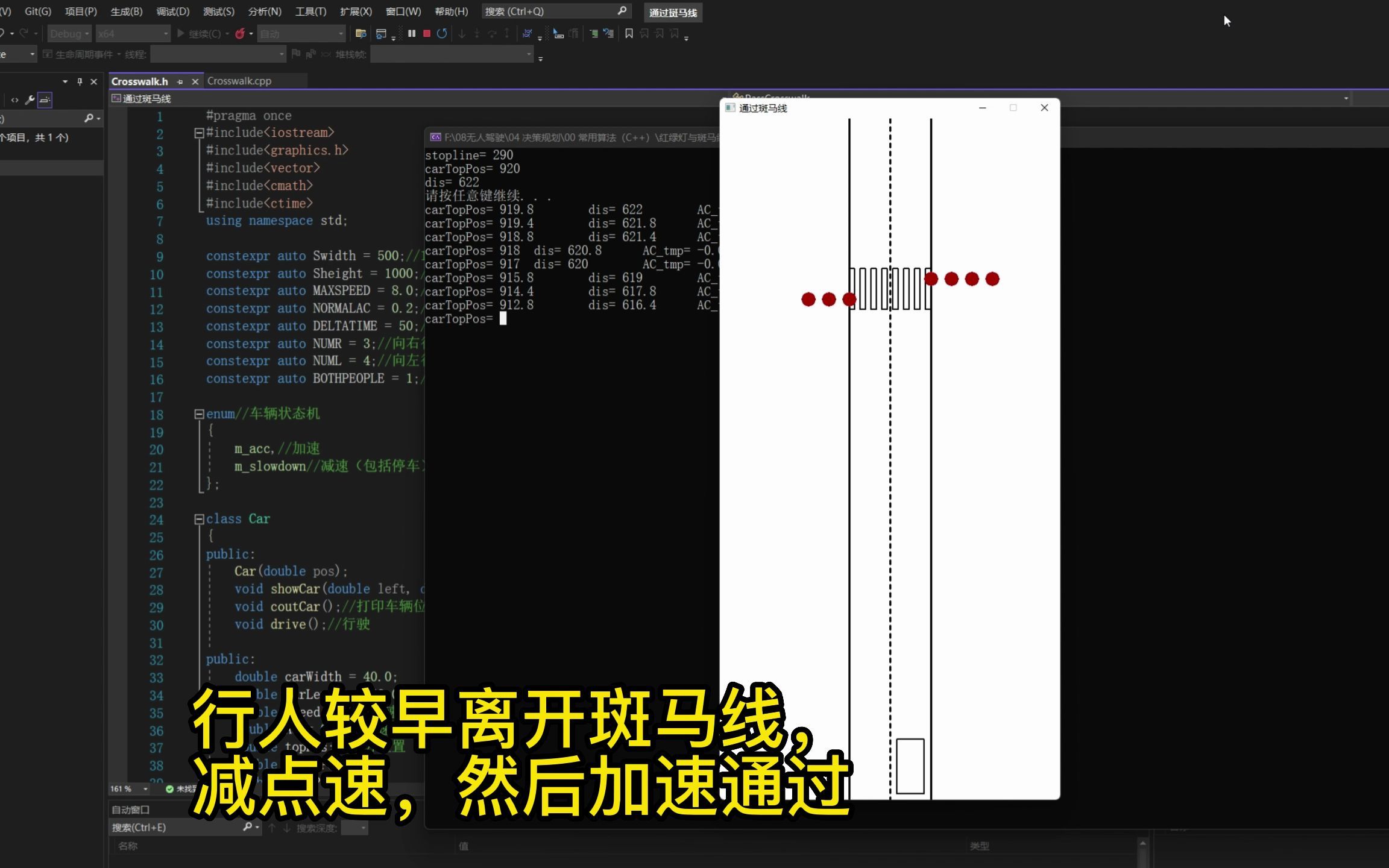
【决策规划算法】五次多项式曲线插值算法(C++)
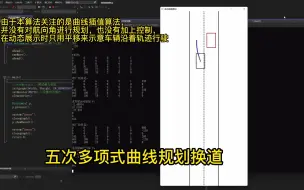
【决策规划算法】换道场景曲线对比与选择(C++)
【决策规划算法】人工势场算法(C++)
为什么机械行业没有出现大猛子?
【Apollo调试】斑马线场景(决策规划算法)
自动驾驶算法为什么这么卷?
【Apollo调试】限速通过减速带
【C++自动驾驶项目】自动泊车的6种方式,一定要看到最后
【Apollo调试】Apollo规划算法静态障碍物绕行调试及代码解读
自动驾驶算法的鄙视链
关于我是如何转行成为一名自动驾驶算法工程师的
《基于ROS2的决策规划算法工程开发》实机演示
学车辆工程可以从事自动驾驶算法吗?
学A星算法 这门课就够了!
【保姆级】跟着代码学Apollo决策规划 绪论1:课程概述
【决策规划算法】人工蚁群算法(C++)
【决策规划算法】贝塞尔曲线(C++)
用C++还原砖叔经典漂移动作 - 致敬Ken Block
Astar算法三种类型距离效果演示
A星算法很简单吗?
【保姆级】跟着代码学Apollo决策规划 Routing模块5:拓扑地图创建主流程
【C++】我用C++写了一个七夕小程序
【保姆级】跟着代码学Apollo决策规划 Routing模块7:U型弯的判断
【Apollo调试】自动泊车调试:有停车位、倒车入库
【Linux+vscode+cmake实战系列】Linux下Matplot++快速使用指南
【Apollo调试】绕障与跟车测试
Carla+ROS2联合仿真测试,像玩极品飞车一样
《基于ROS2的决策规划算法工程》动态避障演示 无人小车的松弛感
逐帧解读小米自动驾驶 透过发布会看SU7智驾算法
说一个没人教过你的学习方法
【保姆级】跟着代码学Apollo决策规划 Routing模块9:智能指针简介
这样的A*算法你会写吗?
【C++自动驾驶项目】无人小车 穿梭自如
【保姆级】跟着代码学Apollo决策规划 Routing模块13:Navigator初始化、SearchRoute函数
【保姆级】跟着代码学Apollo决策规划 Routing模块2:运行机制
机械专业是天坑吗?机械好就业?机械也能拿高薪?
自动驾驶行业有人情世故吗?
【Apollo调试】红绿灯场景调试(自动驾驶仿真)
挑战用C++复现李峋同款“跳动的心”
【保姆级】跟着代码学Apollo决策规划 Routing模块6:平面向量的基本概念