V
主页
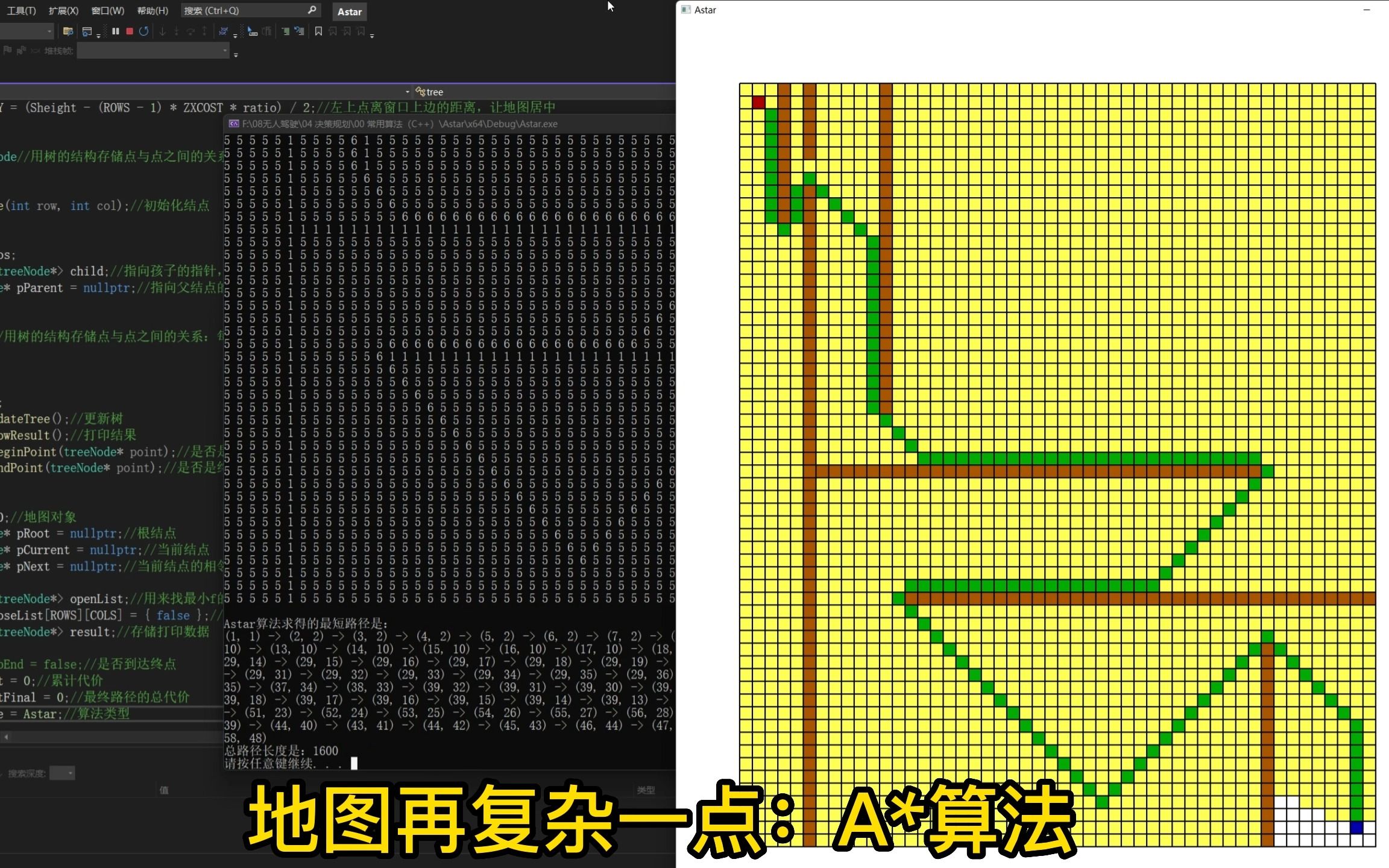
【决策规划算法】Astar、Dijkstra、BestFS算法对比演示(C++)
发布人
我用C++写的几种常见的全局路径规划算法(Astar Dijkstra BestFS)的对比演示,基于easyX库输出图形; 源代码已发表至这篇文章:https://zhuanlan.zhihu.com/p/545321325 知乎ID:CODspielen
打开封面
下载高清视频
观看高清视频
视频下载器
《基于ROS2的决策规划算法工程开发》实机演示
【决策规划算法】超车与绕障(C++)
【Apollo调试】绕障与跟车测试
ROS2自动驾驶|边做边学(一)里程计与控制
【Apollo调试】限速通过减速带
【无人驾驶技术】特斯拉FSD自动驾驶将进入国内,这个自动驾驶系列知识课程,手把手教你如何从入门到提高—感知实战、视觉定位、预测系统、路径规划、控制理论、强化学习
【决策规划算法】调头算法(C++)
【决策规划算法】漂移算法(C++)
【Apollo调试】Apollo规划算法静态障碍物绕行调试及代码解读
如何快乐地单步调试Apollo9.0源代码?一次讲清楚
自动驾驶算法的鄙视链
【Linux+vscode+cmake实战系列】Linux下Matplot++快速使用指南
关于我是如何转行成为一名自动驾驶算法工程师的
【决策规划算法】换道场景曲线对比与选择(C++)
【vscode+cmake实战系列】环境搭建与配置
学车辆工程可以从事自动驾驶算法吗?
萝卜快跑火了,那自动驾驶算法工程师会吃香吗?
【保姆级】跟着代码学Apollo决策规划 绪论1:课程概述
【决策规划算法】自动泊车算法(C++)
Carla+ROS2联合仿真测试,像玩极品飞车一样
【Apollo调试】红绿灯左转待转区场景
【Apollo调试】红绿灯场景调试(自动驾驶仿真)
【决策规划算法】通过红绿灯(C++)
Apollo新版dreamview太好用了!
Turtlebot4+ROS2+新版Gazebo仿真试玩
【vscode+cmake实战系列】VS还是VS Code?
【vscode+cmake实战系列】构建、编译与调试
【决策规划算法】无保护左转(C++)
【C++自动驾驶项目】无人小车 穿梭自如
【决策规划算法】通过斑马线(C++)
【保姆级】跟着代码学Apollo决策规划 Routing模块5:拓扑地图创建主流程
【vscode+cmake+git实战系列】08 复杂项目-cmake嵌套构建
【C++自动驾驶项目】自动泊车的6种方式,一定要看到最后
【保姆级】跟着代码学Apollo决策规划 Routing模块13:Navigator初始化、SearchRoute函数
“虽然外表简陋,但我会漂移”(自动驾驶漂移算法 C++编写)
用C++还原砖叔经典漂移动作 - 致敬Ken Block
C++初学者不妨试试这个项目
Apollo新版dreamview场景调试演示
看完就能跑通!跟着大佬25个小时吃透【无人驾驶技术】全套教程,从理论到上手,感知实战、视觉定位、路径规划、预测系统一次学个明白!!!
【保姆级】跟着代码学Apollo决策规划 Routing模块2:运行机制