V
主页
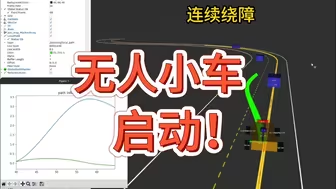
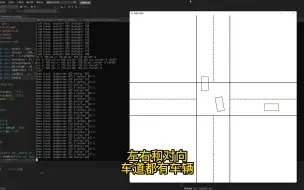
【Apollo调试】绕障与跟车测试
发布人
Apollo功能测试:绕障与超车 包括了5个场景: 1,绕过前方静态障碍物,不限速; 2,绕过前方静态障碍物,限速; 3,前方有车辆汇入,跟车行驶,不限速; 4,前方有车辆汇入,跟车行驶,限速; 5,前方有车辆汇入,跟车行驶,随后前车停止,绕过前车。
打开封面
下载高清视频
观看高清视频
视频下载器
【Apollo调试】Apollo规划算法静态障碍物绕行调试及代码解读
【Apollo调试】红绿灯场景调试(自动驾驶仿真)
【Apollo调试】自动泊车调试:有停车位、倒车入库
【Apollo调试】限速通过减速带
【Apollo调试】安装完成,开始调试(基于WSL2)
【自动驾驶技术】花18000大价钱买的无人驾驶课程,从入门到提升的自动驾驶算法——感知实战、视觉定位、预测系统、路径规划、控制理论、强化学习
【Apollo调试】红绿灯左转待转区场景
【Apollo调试】U型弯调头场景(自动驾驶仿真)
《基于ROS2的决策规划算法工程》动态避障演示 无人小车的松弛感
【Apollo调试】DreamView仿真测试(基于原生Ubuntu20.04)
Apollo9.0仿真驾驶-靠边启动
Carla+ROS2联合仿真测试,像玩极品飞车一样
【决策规划算法】人工势场算法(C++)
“虽然外表简陋,但我会漂移”(自动驾驶漂移算法 C++编写)
《基于ROS2的决策规划算法工程开发》实机演示
【决策规划算法】通过红绿灯(C++)
自驾人受益匪浅!Apollo核心讲解之Cyber RT
【决策规划算法】调头算法(C++)
【决策规划算法】B样条曲线(C++)
两个萝卜同频行驶
萝卜快跑火了,那自动驾驶算法工程师会吃香吗?
自动驾驶算法的鄙视链
Astar算法三种类型距离效果演示
自动驾驶会抢司机饭碗?别急!先听我分析!
5分钟回顾极越全新端到端AI智驾发布会高光瞬间!
【决策规划算法】人工蚁群算法(C++)
这样的A*算法你会写吗?
【决策规划算法】通过斑马线(C++)
【保姆级】跟着代码学Apollo决策规划 Routing模块4:routing主流程和文件结构
【决策规划算法】无保护左转(C++)
【保姆级】跟着代码学Apollo决策规划 Routing模块6:平面向量的基本概念
Apollo9.0仿真驾驶-路口减速行驶
【全网最详细】Linux如何安装最新版GCC和cmake?
A星算法很简单吗?
挑战用C++复现李峋同款“跳动的心”
特斯拉超级计算集群Cortex,500兆瓦!耗电量惊人
C++初学者不妨试试这个项目
首次体验无人驾驶
【保姆级】跟着代码学Apollo决策规划 Routing模块1:操作演示
GNN图神经网络实战:基于GNN实现驾驶轨迹预测,论文解读+源码复现!(深度学习/计算机视觉/自动驾驶)