V
主页
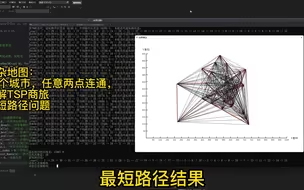
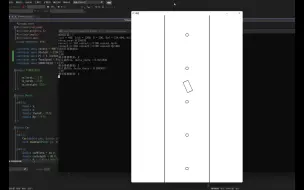
【决策规划算法】动态规划与Dijkstra算法(C++)
发布人
我用C++写的动态规划与Dijkstra算法演示,基于easyX库输出图形; 动态规划源代码:https://zhuanlan.zhihu.com/p/543355015 Dijkstra源代码:https://zhuanlan.zhihu.com/p/531298828 BGM:《最终幻想7》Tifa's theme
打开封面
下载高清视频
观看高清视频
视频下载器
《基于ROS2的决策规划算法工程开发》实机演示
【自动驾驶技术】花18000大价钱买的无人驾驶课程,从入门到提升的自动驾驶算法——感知实战、视觉定位、预测系统、路径规划、控制理论、强化学习
【Apollo调试】Apollo规划算法静态障碍物绕行调试及代码解读
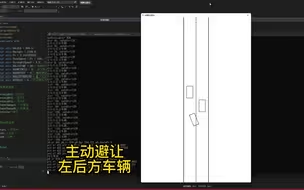
【决策规划算法】超车与绕障(C++)
吊打ORB3!73Hz!南洋理工重磅开源AirSLAM:无惧复杂光照的超强点线视觉SLAM!
【决策规划算法】通过红绿灯(C++)
【决策规划算法】人工蚁群算法(C++)
【Apollo调试】限速通过减速带
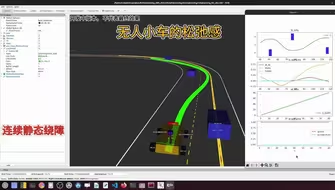
《基于ROS2的决策规划算法工程》动态避障演示 无人小车的松弛感
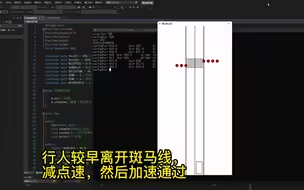
【Apollo调试】斑马线场景(决策规划算法)
【Apollo调试】绕障与跟车测试
C与C++的区别究竟是什么?
算法突击训练营
【Linux+vscode+cmake实战系列】Linux下Matplot++快速使用指南
【决策规划算法】绕桩算法(C++)
自动驾驶算法的鄙视链
萝卜快跑火了,那自动驾驶算法工程师会吃香吗?
学车辆工程可以从事自动驾驶算法吗?
【决策规划算法】Astar、Dijkstra、BestFS算法对比演示(C++)
【Apollo调试】U型弯调头场景(自动驾驶仿真)
metapp - C++ 反射和元数据开源代码库
【决策规划算法】通过斑马线(C++)
【全748集】华为大佬终于把C语言做成动画片了,通俗易懂,2024最新版,学完即就业!拿走不谢,学不会我退出IT圈!
Carla+ROS2联合仿真测试,像玩极品飞车一样
中科院新作!即插即用的meshing模块!精确构建无动态mesh地图,还能纠正里程计!
C++ 中的计算几何算法指南,从入门到精通
深度学习基础 | 网络模式 | model.train()、 model.eval()
【全网最详细】Linux如何安装最新版GCC和cmake?
教会AI如何做梦——玻尔兹曼机讲解
【手搓代码】从零手搓扩散模型Flow Matching(Rectified Flow)第一回:无条件生成,算法、模型、训练、推理全覆盖,github同步开源
【QWidget】ElaWidgetTools:次世代QT界面框架,最新更新!
【数学建模编程手必看】41种数模国赛常用算法-matlab代码,免费分享领取
“虽然外表简陋,但我会漂移”(自动驾驶漂移算法 C++编写)
步进电机运动的八大加减速算法(图示算法解析)
双足机器人强化学习新算法测试,支持自动切换行走与站立步态
论文精读: 生成式推荐系统新范式
【C++ STL】全网最完整的map教程
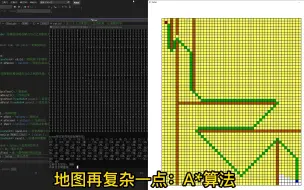
这样的A*算法你会写吗?
【保姆级】跟着代码学Apollo决策规划 绪论3:决策规划模块概述
图的邻接矩阵-代码实现 数据结构与算法