V
主页
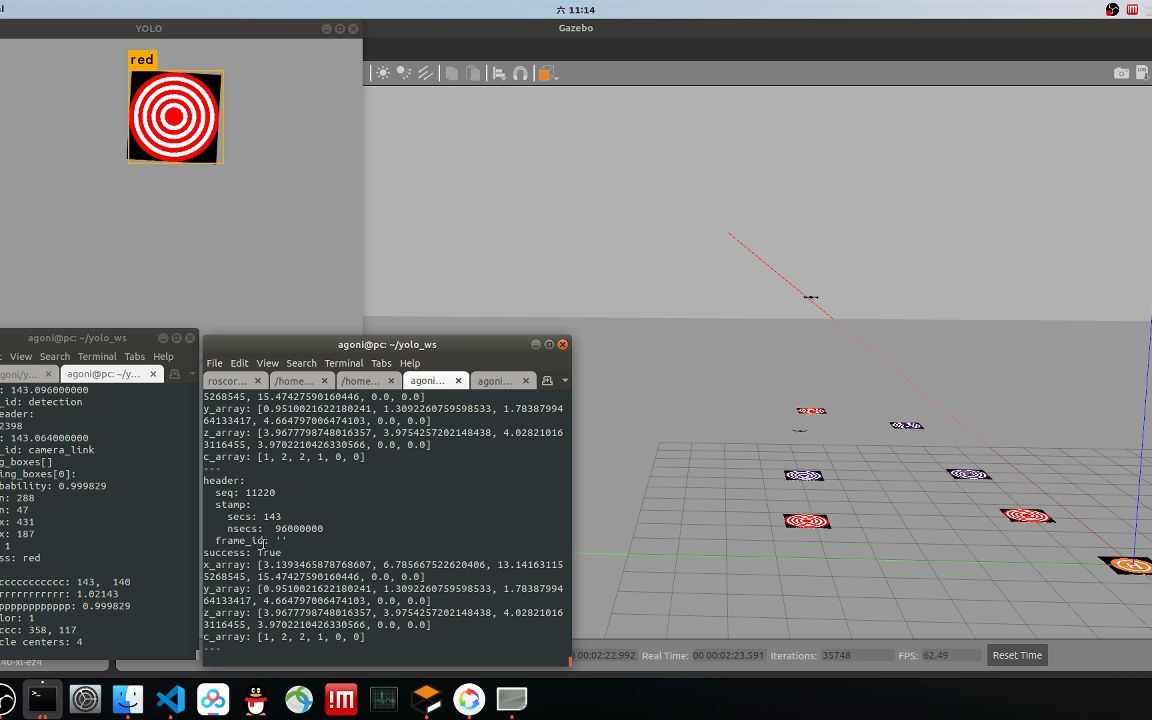
2.yolo检测方法仿真
发布人
此视频为“2021年四川省大学生未来飞行器挑战赛”在Gazebo中使用yolo检测方法进行目标检测的软件在环仿真视频,赛题如下: 比赛区域(10 m *20m *6m)为室内场地(地面为单色且与目标物颜色有明显区别的平面),随机设置模拟水灾(直径 100cm 蓝色区域)位置点3个、火灾(直径 100cm 的红色区域)位置点3个,起降区为直径 110cm 的停机坪;飞行器由停机坪一键起飞后,到达设定的观测点,经裁判确认后,转换为自动模式(手动则扣分),通过机载传感器自主搜索这些模拟水灾、火灾位置点;在模拟水灾位置投放模拟绳索,在模拟火灾位置点投放模拟灭火湿巾;完成所有任务后,回到起降区自主降落。
打开封面
下载高清视频
观看高清视频
视频下载器
1.传统检测方法仿真
3.硬件在环仿真
5.比赛视频
【开源无人机】舵机控制教学
【开源无人机】零基础首飞一架开源无人机
【开源无人船】从零调试一艘开源无人船
7-nano飞控与共轴反桨无人机
第16讲:使用Gazebo位姿真值|模拟动捕系统
【开源无人机】从零调试一架开源无人机
新款7-nano飞控飞共轴无人机
【Python】柔顺控制——导纳控制
【Python】振动抑制——改进输入整形
【开源无人机】4G模块及远程连接使用教程
轨迹预测会不会被端到端干掉?Path-based的轨迹预测还有未来么?
雷迅新品7-nano飞控开箱测评
rda-ros开源:RDA planner 的ROS接口及在自动驾驶和动态避障方面的应用展示
【Python】模仿学习——高斯混合模型
【Python】冗余机械臂——逆运动学
基于yolo和moveit的图像识别机械臂目标抓取搬移
【多目标跟踪】毕设新手村:YOLOV8+YOLOV9+Deepsort实时对象跟踪、车辆计数、人流跟踪检测、深度学习目标检测
【开源无人机】Vins_fusion代码讲解
【开源无人船】从零组装一艘开源ROS无人船
【Python】模仿学习——动态运动基元
多决策智能体的运动规划——上海交大董伟老师与荷兰代尔夫特理工Javier老师深度讨论
【自制】论文实验|项目验收|仿真竞赛|算法验证不可或缺的无人机仿真平台
【开源无人机】Ego_Planner程序控制飞行
第24讲:解决Ego在仿真中不能运行的问题
第1讲:仿真平台框架介绍
新品!SKYE 2 智能空速计,新升级,全面防水保护!
【开源无人机】vins定位手动飞行
#雷迅创新#CUAV#太阳能飞机7.5小时续航测试
【开源无人机】超维无人机奔赴科研竞赛一线
ICRA'24 | RGBManip:仅基于单目RGB相机的机器人自主环境感知和操纵,实现精准环境感知
使用ROS2 Control来控制四足机器人
IROS'24 南开大学 | 通过动态拓扑图上的Voronoi划分实现快速且通信高效的多无人机探索
4.投放装置展示
RAL 24 ETH等发布! 从视觉中识别地形物理参数——走向物理参数感知的运动与导航
PX4自动代码生成,pixhawk,使用MBD搭建神经网络控制四旋翼,强化学习,神经网络控制,四旋翼姿态控制
别眨眼这就是科学的力量
在刚果金考察铜矿,我才知道什么叫眼冒绿光