V
主页
ICRA'24 | RGBManip:仅基于单目RGB相机的机器人自主环境感知和操纵,实现精准环境感知
发布人
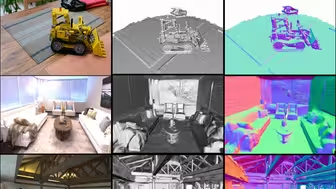
#+“SLYYDS24”,领【24年100篇最新智驾论文➕多领域面试真题➕公开课课件回放➕高质量交流群】,备<100># 在这项研究中提出了一种开创性的方法,用于单目机器人操作中的主动姿势估计。该方法方法独特地为机器人配备了处理不同任务的能力,只需单目RGB输入。这是通过一个三管齐下的过程实现的。1)机器人主动探索环境。2)从探索中提取感兴趣物体的姿势信息。3)通过闭环阻抗控制策略实现操作。。。。。。。 标题:RGBManip: Monocular Image-based Robotic Manipulation through Active Object Pose Estimation 链接:https://rgbmanip.github.io/
打开封面
下载高清视频
观看高清视频
视频下载器
浙大、上海人工智能实验室等即将开源PGSR: 平面3DGS提升表面几何,超越 2DGS、GOF,实现渲染新高度
研一在读,导师让学自动驾驶环境感知?有这45篇经典论文就够了!
SIGGRAPH'24 | 逆天!利用分层3D高斯表示,实时渲染超大规模场景!
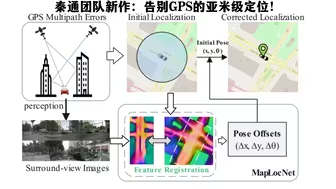
IROS24新作 | 上交大秦通团队,MapLocNet:实现自动驾驶新突破 告别GPS的亚米级定位!
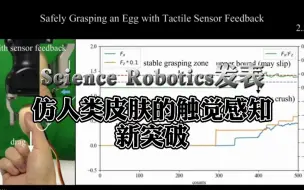
Science Robotics | 无需外部传感器,通过关节力矩传感技术即可实现"触摸即命令"
ECCV'24 | 无图定位新突破!从低精地图到使用全景-BEV联合检索网络进行跨视图图像地理定位。
清华大学孙富春教授团队 综述:触觉感知在机器人灵巧操作中的应用与进展
CVPR'24 满分Oral | EscherNet 实现任意视角灵活扩散生成 解锁3D视觉无限可能!
知名投资人彼得·蒂尔:这两年的AI领域,只有英伟达疯狂赚钱,其他的都在赔钱!
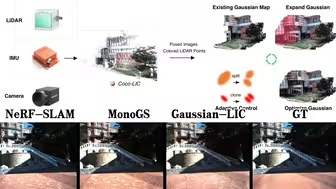
浙大TUM联合出品|Gaussian-LIC:首个LiDAR-IMU-Camera融合的3DGS-SLAM系统
NTU开源 | AirSLAM:高效且 光照稳健的点线视觉SLAM系统 嵌入式运行速度可达40HZ
计算机视觉最不卷的方向:三维重建学习路线梳理
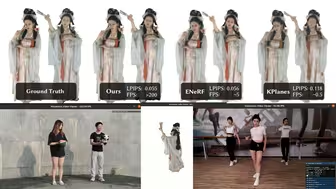
CVPR'24 | 4K分辨率实时4D 视图合成,好于eNeRF30倍并达到了最先进的渲染质量
《Nature》刊发北航重磅成果!Nature、Science首页共同推荐!北航 | CoulombFly:超轻微型飞行器的太阳能持续飞行
ECCV'24 Oral 满分论文 | SpikeYOLO:脉冲神经网络新进展,引领高能低耗目标检测新纪元
ETH最新!CVPR | 2024NeLF-Pro:用于多尺度新视图合成的神经光场探针,一个方法解决多种规模场景的快速渲染重建
SA-GS:在3D高斯抛雪球中实现SAM任意物体分割,无需任何训练过程和学习参数,通过交互式过程实现3D高斯抛雪球物体分割
对神经网络某一层做了小改进,效果却提升显著,可以发论文吗? -人工智能/机器学习/深度学习
ICRA 2024 最佳学生论文奖 | NoMaD:基于Transformer用于 导航和探索的目标掩蔽扩散策略
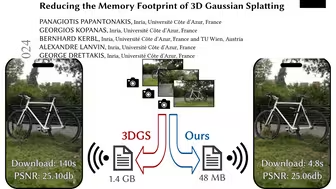
3DGS官方团队新作!减少3DGS内存占用,可达29.87倍压缩,渲染速度提高1.7倍!
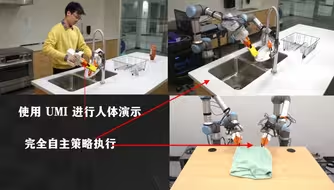
斯坦福大学提出了通用操纵界面(UMI)一种数据收集和策略学习框架,可将人类演示的技能直接转移到可部署的机器人策略中。
【开源】也许会是目前功能最多的激光SLAM(Lidar SLAM)
超越BEVFusion!DifFUSER:扩散模型杀入自动驾驶多任务(BEV分割+检测双SOTA)
GaussianPro:具有渐进传播的3D高斯泼溅,该方法在Waymo数据集上明显超越了3DGS
来自Meta团队的SceneScript,LLM赋能“3D场景重建”,引爆你的AR/VR等应用体验,惊艳效果超越你的想象!
DiffTF:基于Transformer的大词汇量高质量 3D 物体生成框架,能够实现具有高度多样性、丰富语义和高质量的大词汇量3D物体生成。
3D Gaussian Splatting在自动驾驶中的应用——建模动态城市场景
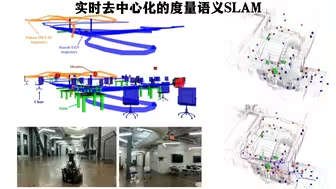
异构机器人无GPS协作!宾大重磅推出SlideSLAM:实时去中心化的度量语义SLAM
自主旋翼无人机导论
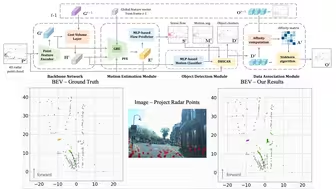
ICRA'2024 | 最新开源!RaTrack4D:使用4D雷达点云进行移动物体检测和跟踪
Research | 受章鱼行为启发 的具有爬行和游泳能力的可脱 离机械臂工作的水下软体抓手
RSS'2024 | MPCC++:升级无人驾驶安全盾牌,首次在现实中达到100%防撞率
第一个利用GPT-4V在现实场景中进行开放式推理和自适应规划的闭环框架: COME-robot
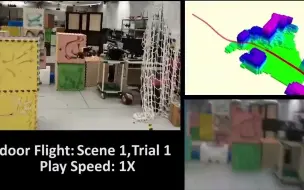
港科大最新工作:无人机快速飞行中智能鲁棒感知和轨迹规划策略
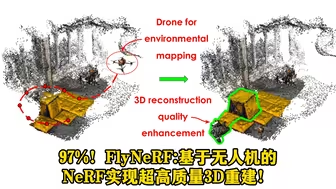
97%!FlyNeRF:基于无人机的NeRF实现超高质量3D重建!
突破!《Science Robotics》:机器人触觉传感器的自解耦和超分辨率
CVPR 2024 | 进一步加速落地:压缩自动驾驶端到端运动规划模型,PlanKD:一种为压缩端到端运动规划器量身定制的知识蒸馏方法
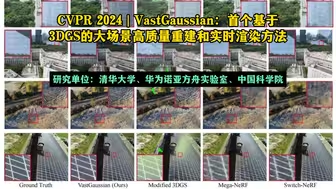
CVPR 2024 | VastGaussian:首个基于3D GS的大场景高质量重建和实时渲染方法,出自清华大学、华为诺亚方舟实验室、中国科学院
不受物体数量和类别限制的全方位3D分割OmniSeg3D:通过分层对比学习实现全方位3D分割
一款面向无人机领域相关专业应用研究和二次开发的中小型自主智能无人机平台:问天L240自主智能无人机实验平台