V
主页
【021】基于神经网络的电力系统暂态稳定分布式自适应控制
发布人
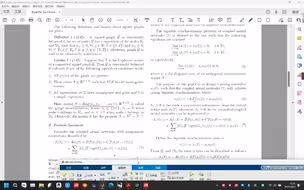
【021】基于神经网络的电力系统暂态稳定分布式自适应控制 【内容简介】针对电力系统中普遍存在的系统非线性和参数不确定性等问题,提出一种基于径向基函数神经网络(RBFNN)的分布式自适应控制器,以提高多机电力系统的暂态稳定性,利用基于RBFNN的方法对系统中的未知非线性项和外部扰动进行补偿,设计相应的自适应参数估计方法,逼近未知非线性项的理想权值矩阵,该策略基于多智能体框架,分布式控制器通过通信网络接收测量装置测量的实时数据,并控制储能装置动作,使受到扰动后各发电机能够迅速实现频率同步,利用李雅普诺夫稳定性理论,证明所提出的分布式控制方法的收敛性, 【#非搬运】【#m文件】【#程序原创】 【注意事项】 -1. 复现结果与上图中一致,但可能无法完全还原 Paper 中的结果! -2. 由于代码的可复制性,请在确认需求后再付款,购买后无法提供退款服务! -3. 仅能够用于学习交流用途,不可用于商业用途,违者必究! -4. 代码为原创非搬运,因此可提供代码(非 Paper)内的 所有 问题讲解! -5. 流程:拍下(可改价)->付款->直接发货->确认收货! -0. 接受上述事项后再拍(上述5条截图保存),介意者勿拍!
打开封面
下载高清视频
观看高清视频
视频下载器
【最新一期】231.不会吧?不会吧?不会吧?还不会写控制理论相关的Matlab仿真?学长带你从小白->萌新,再到入门!!!
【最新一期】【232】带有有输出约束的二阶滑模控制器设计,学长带你从小白->萌新,再到入门!!!
【269】【复现】随机非线性系统的动态事件触发强化学习控制方法
【049】【免费】基于事件触发机制的一阶多智能体的一致性仿真
【037】利用多智能体的思想来解决电网的功率分配问题(考虑发电机的功率限制)
【免费】这是之前我购买的一大堆代码,同学们,觉得有用吗?可以都送给你们!!!(链接在评论区置顶)
【018】带有半马切换拓扑的事件触发领导跟随多智能体系统一致性
【051】拒绝服务攻击下的网络化系统安全控制研究
【027】基于分布式模型预测控制的无人船编队控制
【255】【复现】带Pining控制的耦合神经网络的二部同步准则
【066】【复现】基于动态事件触发策略的非线性随机系统故障检测
【023】基于干扰观测器的输入饱和多智能体系统事件触发控制
【044】【免费】T-S模糊网络多智能体系统DoS攻击和执行器故障的容错包容控制
【055】二阶非线性多智能体系统的分布式编队控制
【176】基于Lyapunov模型预测控制(NMPC)的自主水下航行器轨迹跟踪控制,结合事件触发非周期采样策略
【001】事件触发下多智能体系统一致性的干扰主动控制
【011】非完整移动多机器人系统有限时间一致性控制
【059】【IEEE TNNLS】基于事件触发策略的具有通信延迟的切换延迟神经网络的同步问题研究
【219】 一类不确定非线性系统的自适应预设时间控制问题
【084】探索基于反馈的掩蔽(或者‘遮罩’)方法的边保护一致性控制方法
【047】【复现】基于事件触发二阶多智能体系统的固定时间比例一致性
【151(补)】【高阶编程技巧】事件触发的稳定控制任务实时调度
【026】【复现】四旋翼飞行器自适应动态面轨迹跟踪控制
【042】东北大学硕士论文-基于事件触发机制的不确定线性系统的鲁棒控制
【076】非线性二阶多智能体系统事件触发机制的设计
【067】切换拓扑下动态事件触发多智能体系统固定时间一致性
【275.004】【控制理论与控制工程】带有状态约束和死区输入非仿射多智能体系统的自适应分布式跟踪控制
【022】基于平均驻留时间的切换模型参考自适应控制方法的研究
【242】六自由度无人水下航行器 6DOF-Unmanned Underwater Vehicles (UUV)
【275.003】【控制理论与控制工程】带有状态约束和死区输入非仿射多智能体系统的自适应分布式跟踪控制
【071】连续时间动态系统基于事件的脉冲控制及其在记忆神经网络同步中的应用
【039】基于事件触发机制的一阶多智能体系统的一致性仿真(采样的和连续的)
【177】多智能体系统中分布凸优化的一种固定时间收敛算法
【008】基于动态事件触发策略的二阶多智能体系统主动抗干扰控制
【004】基于事件触发的微电网经济分配一致性算法
【111】带有输入延迟的非严格反馈非线性系统的自适应控制方法
【007】事件触发机制下一阶线性多智能体系统平均一致性
【003】单积分型多智能体系统的集中事件触发控制
【217】【RNC】有输出约束和无输出约束的高阶非线性系统有限时间镇定的统一方法
【015】基于动态事件触发机制的随机采样策略下的半马尔科夫跳变的多智能体系统一致性