V
主页
机器人中的IMU有什么用
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
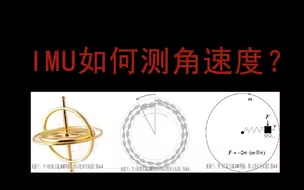
IMU如何测角速度
机器人SLAM为什么需要编码器
【浅显易懂】卡尔曼滤波原理解读
IMU如何测加速度
【全网最详细】RGB-D相机原理分析
IMU的数据如何采集
机器人轮式里程计究竟是什么
激光雷达工作原理解读
搞机器人开发需要懂硬件吗
SFM、BA和SLAM比较
【全网最详细】摄像头原理分析
卡尔曼滤波的本质
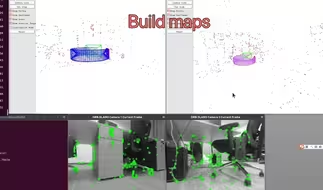
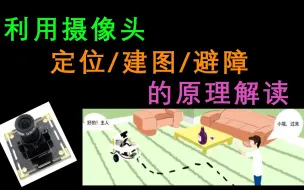
【机器人关键技术】利用摄像头定位、建图、避障的原理解读
谷歌cartographer构建大规模地图(激光雷达+IMU+轮式里程计融合建图)
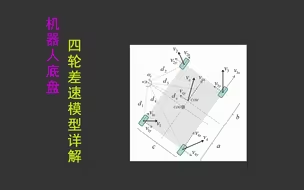
机器人底盘四轮差速模型详解
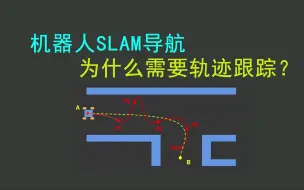
机器人SLAM导航为什么需要轨迹跟踪
[RA-L2023] CamMap:基于SLAM地图对齐方式的非重叠视场相机的外参标定
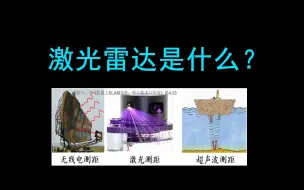
激光雷达是什么
机器人底盘开发很简单吗
机器人底盘两轮差速模型演变过程
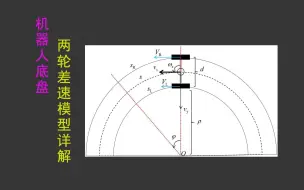
机器人底盘两轮差速模型详解
【全网最详细】双目摄像头原理分析
【自己搭建机器人】主机选择
【机器人操作系统】ROS与ROS2.0区别是什么
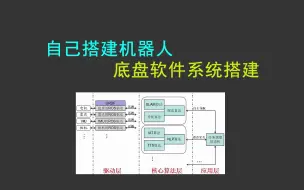
【自己搭建机器人】底盘软件系统搭建
最大似然、最小二乘和贝叶斯估计的区别
10元自制远程开关
搞机器人开发如何选电脑主机
【3分钟快速入门】机器人传感器
【深入浅出】嵌入式终于有人给讲清楚了
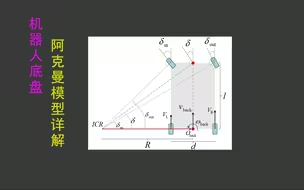
机器人底盘阿克曼模型详解
激光雷达畸变校准
【自己搭建机器人】运动学模型选择
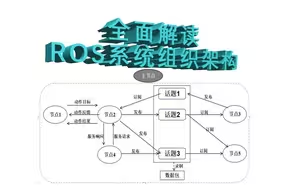
【机器人操作系统】全面解读ROS系统组织架构
厘米级RTK定位模组,动了就有反应!
SLAM算法的本质数据关联
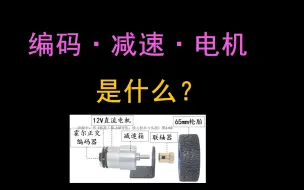
编码减速电机是什么
先学激光SLAM还是先学视觉SLAM
SLAM算法实现为何基于ROS接口
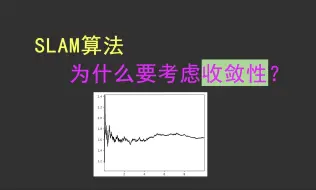
SLAM算法为什么要考虑收敛性