V
主页
IMU如何测角速度
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
机器人中的IMU有什么用
IMU的数据为什么要滤波
双目相机如何标定
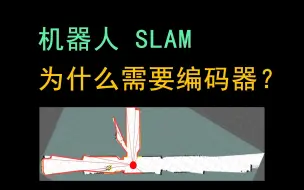
机器人SLAM为什么需要编码器
IMU究竟是个啥
【全网最详细】RGB-D相机原理分析
双目相机如何读取图像数据
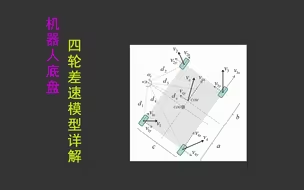
机器人底盘四轮差速模型详解
IMU的数据如何采集
SLAM技术是伪需求吗
粒子滤波的本质
C++、ROS和SLAM是什么关系
激光雷达是什么
机器人SLAM导航为什么需要轨迹跟踪
机器人轮式里程计究竟是什么
【机器人操作系统】ROS与ROS2.0区别是什么
图像滤波的原理终于有人给讲明白了
IMU如何测磁力
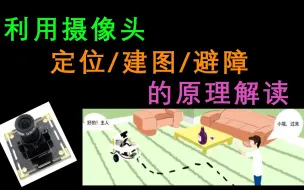
【机器人关键技术】利用摄像头定位、建图、避障的原理解读
机器人中的摄像头传感器
搞SLAM算法还有前途吗
激光雷达畸变校准
【自己搭建机器人】传感器选择
最小二乘问题直接求解
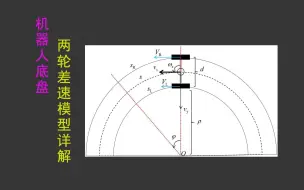
机器人底盘两轮差速模型详解
IMU在ROS中演示
单目相机如何标定
卡尔曼滤波的本质
机器人底盘两轮差速模型演变过程
【一看就懂】SLAM算法原理通俗解读
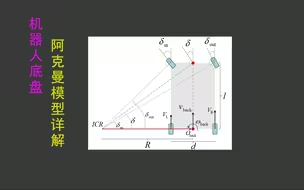
机器人底盘阿克曼模型详解
SFM、BA和SLAM比较
SLAM算法实现为何基于ROS接口
【浅显易懂】卡尔曼滤波原理解读
【3分钟快速入门】机器人传感器
SLAM算法快速入门
【保护眼睛】眼睛是心灵的窗户,机器人的心灵之窗呢
激光雷达工作原理解读
图像ORB特征提取速度为什么快
OpenCV图像处理与PCL点云处理