V
主页
京东 11.11 红包
【ICRA2021】基于训练数据自动生成的动态对象感知 LiDAR SLAM
发布人
具有移动物体(如汽车或人类)的高度动态环境可能对假设大部分静态场景的 LiDAR SLAM 系统构成性能挑战。为了克服这一挑战并支持机器人在现实世界场景中的部署,我们为动态对象感知 LiDAR SLAM 算法提出了一个完整的解决方案。这是通过利用可以检测动态对象的实时神经网络来实现的,从而使我们的系统能够明确地处理它们。为了有效地生成必要的训练数据,这是我们方法的关键,我们提出了一种新颖的基于端到端占用网格的管道,它可以自动标记各种任意动态对象。因此,我们的解决方案可以推广到不同的环境
打开封面
下载高清视频
观看高清视频
视频下载器
【ICRA2021】LiDAR和相机的基于线的自动外部校准
【ICRA2021】3475-OV2SLAM:用于实时应用的完全在线和通用的视觉SLAM
轮式里程计激光里程计视觉里程计区别是什么
【ICRA2021】黑盒 LiDAR 里程计的自动超参数调整
【ICRA2021】用于自动驾驶汽车的基于 SRIF 的鲁棒 LiDAR-IMU 定位
【ICRA2021】机器人导航的主动模块化环境
【ICRA2021】视觉惯性里程计的等变滤波器
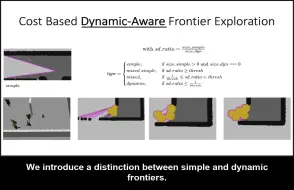
【ICRA2021】人口密集环境中的动态感知自主探索
【ICRA2021】基于实时3d激光雷达、毫米波雷达和GPS/IMU融合的非结构化环境下车辆检测与跟踪
【ICRA2021】S3Net:3D LiDAR 稀疏语义分割网络
【ICRA2021】Kimera-Multi:分布式多机器人度量语义SLAM系统
【开源教程】ROS+PX4开源机械臂控制(上)
【开源教程】ROS+PX4开源机械臂控制(下)
机器人自助定位导航之路的探索
【ICRA2021】中国商店中的机器人:使用强化学习实现特定位置的导航行为
5-1 特征点提取与匹配
【ICRA2021】具有多模态感知不确定性的动态环境中的自主导航
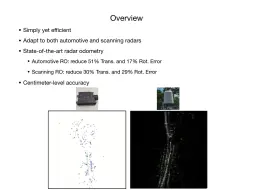
【ICRA2021】为扫描雷达和车载雷达设计的基于正态分布变换的雷达里程计
【ICRA2021】移动机器人 3D 三角形网格上的连续最短路径矢量场导航
【ICRA2021】在线校准的高效多传感器辅助惯性导航
【ICRA2021】用于机器人应用的 LiDAR 里程计的自监督学习
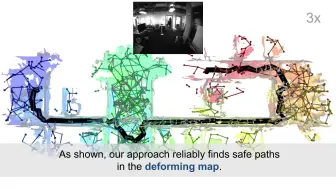
【ICRA2021】3731-用于大规模勘探任务的弹性高效激光雷达重建
ROS控制 | 第一轮控制功能包讲解
SLAM-无人驾驶、VR/AR
【ICRA2021】4081-一种集成波束形成映射的FastSLAM方法用于基于超声波的金属结构机器人检测
【ICRA2020】基于分层四叉树特征光流跟踪的稀疏位姿图视觉惯性SLAM
【ICRA2021】基于递归神经网络的动态占用栅格地图
【ICRA2021】单目直接视觉里程计中基于特征的重定位的紧密集成
【ICRA2021】3794-学习使用各种LiDAR配置进行无地图导航:一种基于支持点的方法
【ICRA2021】学习用于长视界视觉导航的可组合行为嵌入
【ICRA2021】Voxplan:一个使用符号距离函数子图的3D全局规划器
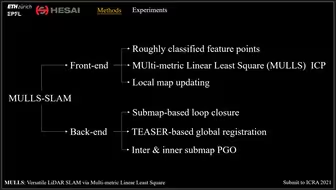
【ICRA2021】MULLS:多度量线性最小二乘法的多功能激光雷达SLAM
压缩感知和消息传递
基于ROS的移动抓取机器人
马斯克特斯拉机器人的最新视频和技术解析
【ICRA2021】互联系统的耦合控制Lyapunov函数及其在四足运动中的应用
【ICRA2021】学习用于主动多摄像头视觉教学和重复的摄像头性能模型
【ICRA2021】高动态环境下基于搜索的类车机器人在线轨迹规划
基于ROS2的树莓派自主定位与导航小车
可视化:RVIZ,机器人仿真,ROS2