V
主页
京东 11.11 红包
【ICRA2021】高动态环境下基于搜索的类车机器人在线轨迹规划
发布人
本文提出了一种基于搜索的部分运动规划器,用于在高动态环境中生成类似汽车的机器人的可行轨迹。规划器通过探索建立在运动原语上的状态图来搜索平滑、安全和接近时间最优的轨迹。为了实现快速的在线规划,我们提出了一种基于运动图元聚合和修剪的高效路径搜索算法。然后,我们提出了一种考虑移动障碍物运动的快速碰撞检查算法。该算法将机器人与障碍物之间的相对运动线性化,然后通过计算点线距离来检查碰撞。受益于快速搜索和碰撞检查算法,规划器可以有效地探索状态时间空间以生成接近时间最优的解决方案。
打开封面
下载高清视频
观看高清视频
视频下载器
【ICRA2021】3475-OV2SLAM:用于实时应用的完全在线和通用的视觉SLAM
【ICRA2021】3764-基于相对安全飞行走廊的动态环境中多旋翼机的在线轨迹规划
【ICRA2021】3602-移动机器人导航的终身学习方法
【ICRA2021】用于机器人视觉和语言导航的分层跨模态代理
【ICRA2021】学习用于长视界视觉导航的可组合行为嵌入
【ICRA2021】连接语义建筑信息模型和机器人:基于2D LiDAR的定位应用
【ICRA2021】动态切换人类预测模型以实现高效规划
【ICRA2021】具有在线校准功能的高效多传感器辅助惯性导航
【ICRA2021】Panoster:激光雷达点云的端到端全景分割
【ICRA2021】MSTC∗:物理约束下的多机器人覆盖路径规划
【ICRA2021】3479-多智能体环境中的实例感知预测导航
【ICRA2021】TT-SLAM:用于平面环境的密集单目 SLAM
【ICRA2021】基于扩展卡尔曼滤波的相机DNN学习景物规则的实时自我姿态估计
【ICRA2021】大规模环境下基于语义直方图的图形匹配实时多机器人全局定位
【ICRA2021】稳健 RGB-D SLAM 系统的多参数优化
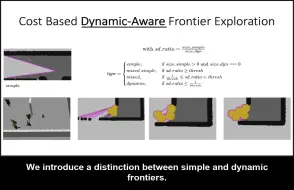
【ICRA2021】3732-RigidFusion:大型动态刚体环境中的机器人SLAM
【ICRA2021】iCalib: 惯性辅助多传感器校准
【ICRA2021】人口密集环境中的动态感知自主探索
【ICRA2021】3853-通过幻觉学习和清醒部署的敏捷机器人导航
【ICRA2021】通过地图建模对自动驾驶车辆进行路线覆盖测试
【ICRA2021】自主驾驶的地面感知单目三维目标检测
【ICRA2021】基于折纸技术的可展开水下机器人回收自主水下航行器设计
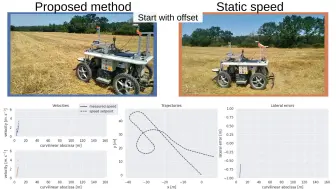
【ICRA2021】轮式越野移动机器人的在线速度波动:一种强化学习方法
【ICRA2021】直接稀疏双目视觉-惯性全局里程计
【ICRA2021】半动态环境中的终身定位
【ICRA2021】基于Hypergame的探索与视觉搜索相结合的自适应行为路径规划
【ICRA2021】CAROM - 道路基础设施单目相机的车辆定位和交通场景重建
【ICRA2021】鲁棒单目视觉惯性深度的嵌入式系统的实现
【ICRA2021】4042-基于可达性的轨迹保障(RTS):用于连续控制的安全快速强化学习安全层
【ICRA2021】PHASER:一种无需对应的鲁棒全局点云配准
【ICRA2021】MDANet:用于深度完成的多模式深度聚合网络
【ICRA2021】基于训练数据自动生成的动态对象感知 LiDAR SLAM
【ICRA2021】SMMR-Explore:具有多机器人多目标势场探测方法的基于子图的多机器人探测系统
【ICRA2021】MS*:一种用于多智能体同时多目标排序和路径查找的精确算法
【ICRA2021】LatentSLAM:用于定位和建图的无监督多传感器表示学习
【ICRA2021】VOLDOR+SLAM:当基于功能或直接的方法还不够好的时候
【ICRA2021】4082-基于观测约束的检索与定位
【ICRA2021】SA-LOAM:具有闭环的语义辅助 LiDAR SLAM
【ICRA2021】挑战性条件下域不变局部特征的自监督学习鲁棒视觉定位
【ICRA2021】从模拟中学习,在现实中赛车