V
主页
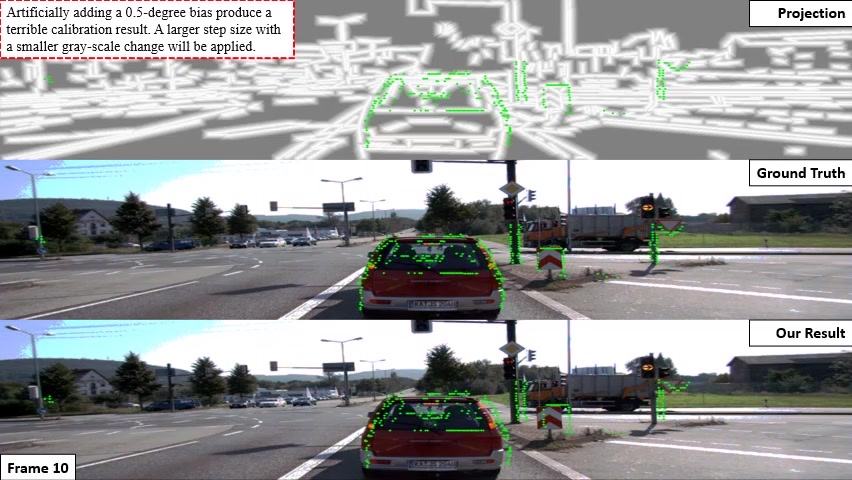
【ICRA2021】LiDAR和相机的基于线的自动外部校准
发布人
3D LiDAR和摄像头的可靠实时外在参数是多模态感知系统的关键组成部分。然而,外在变换可能会在操作过程中逐渐漂移,这会导致感知系统的准确性下降。为了解决这个问题,我们提出了一种基于线的方法,可以在现实世界场景中对 LiDAR 和相机进行自动在线外部校准。在这里,选择线特征来约束其普遍存在的外部参数。最初,从点云和图像中提取和过滤线特征。之后,使用自适应优化来提供准确的外部参数。我们证明了线特征是可以从点云和图像中提取的鲁棒几何特征,从而有助于外部校准。
打开封面
下载高清视频
观看高清视频
视频下载器
【ICRA2021】基于实时3d激光雷达、毫米波雷达和GPS/IMU融合的非结构化环境下车辆检测与跟踪
测量系统分析MSA(完整版)张春洪
【ICRA2021】自动驾驶汽车的轻量级语义网格建图
刘刚-多模多频实时GNSS软件接收机
【SLAM】【空间计算】RoboBaton系列产品正式亮相【三维重建】【AI赋能】
【ICRA2021】3764-基于相对安全飞行走廊的动态环境中多旋翼机的在线轨迹规划
Go2开发教学10-SLAM 导航服务接口
【ICRA2021】强度SLAM:大规模环境的强度辅助定位和建图
使用 Isaac Sim 和 Isaac ROS 实现 AMR 视觉导航
【顾险峰】【中英字幕】计算共形几何系列课程
1-1课程内容与预备知识
【ICRA2021】相机IMU UWB的距离聚焦融合用于精确和减少漂移的定位
【ICRA2021】3602-移动机器人导航的终身学习方法
有缘人见(上)
【ICRA2021】从双目和 RGB-D 相机中注册语义点云的新框架
【ICRA2021】VOLDOR+SLAM:当基于功能或直接的方法还不够好的时候
【ICRA2021】3853-通过幻觉学习和清醒部署的敏捷机器人导航
毫米波雷达+5G在煤矿井下的研究进展
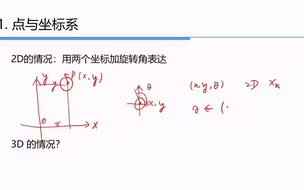
2-1 点与坐标系
【摄影入门教程】是谁还不会相机M档?一个视频就全懂了!
【ICRA2021】高效鲁棒导航的分层目标地图估计
【ICRA2021】用于自动代客泊车的基于混合鸟瞰边缘的语义视觉 SLAM
【CGSAI】SLAM Zero to One
第五届SLAM论坛高飞报告
2-5 实战环节
【ICRA2021】使用快速可见树的实时机器人路径规划
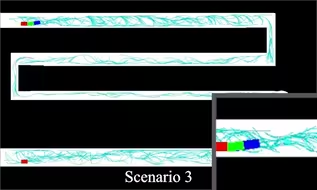
【ICRA2021】3566-决策算法评估的多模态安全关键场景生成
【ICRA2021】FG-Conv:大型 LiDAR 点云理解利用特征关联挖掘和几何感知建模
无人机SLAM入门教程(一):课程概述1.3 传感器简介
【ICRA2021】基于线段的激光雷达-单目联合曲面重建
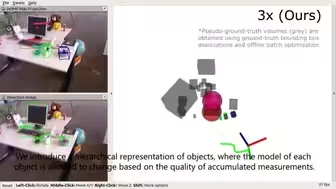
【ICRA2021】使用基于随机有限集的多测量模型过滤 (RFS-M 3) 的自动驾驶车辆 3D 多目标跟踪
SLAM-无人驾驶、VR/AR
【ICRA2021】面向阿克曼转向车辆的基于在线 RRT 的路径规划算法
一个没啥特点的工程化激光slam(某二线城市的“大型”地铁站)
22年十佳开源SLAM算法
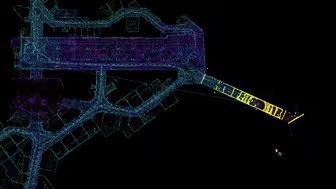
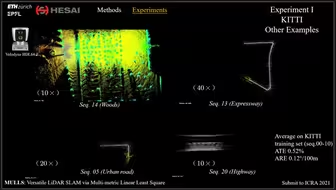
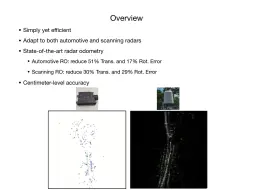
【ICRA2021】为扫描雷达和车载雷达设计的基于正态分布变换的雷达里程计
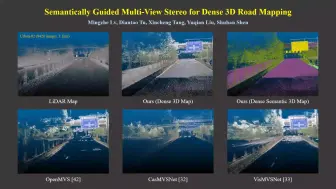
【ICRA2021】基于语义引导的多视角立体密集三维道路制图
【ICRA2021】基于虚拟磁场的实时路径规划
黑洞存在的证明 丘成桐 ICCM 2020华人数学家大会报告
【浙大谭平】从相机标定到视觉SLAM