V
主页
Segment Any Point Cloud:运用视觉基础模型分割一切点云
发布人
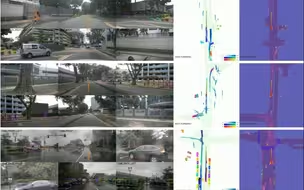
Segment Any Point Cloud: 运用视觉基础模型分割一切点云,公众号【自动驾驶之心】后台回复 “点云”获取课件! 主讲嘉宾: 孔令东(新加坡国立大学博士在读) 简介: 视觉基础模型,如SAM、X-Decoder和SEEM,在图像分割领域取得了跨越式进展。本期talk讨论如何运用这些模型分割自动驾驶场景的点云数据。我们介绍Seal,一个跨相机-激光雷达传感器的无监督学习框架,利用跨模态与跨时空约束学习可泛化的3D表征,在11个室外点云数据集上取得了优异的分割性能。 分享内容: 1. 自动驾驶场景的点云分割 2. Segment Anything简介 3. Seal: 运用视觉基础模型分割一切点云
打开封面
下载高清视频
观看高清视频
视频下载器
视觉分割大模型SAM(原理解析+代码实践)
【CVPR 2024】刷爆榜单!SAFDNet:纯稀疏点云检测问鼎Waymo
最新,语义分割三十年!基础与前沿进展!
MetaBEV:解决BEV检测和地图分割的传感器故障新方案
ECCV24 10篇工作|3D视觉理解、雨滴消除、快速生成、模型蒸馏等
【IROS 2022】机器人超硬核点云配准方法:Linewise Non-Rigid Point Cloud Registration
世界模型!特斯拉CVPR2023 Workshop!
CVPR2023 | 少即是多:降低3D点云语义分割的任务和模型复杂性
基于深度学习的三维计算机视觉技术:三维点云+三维重建算法讲解与项目实战
World Model!大火的世界模型到底是什么?
【CVPR 2024 】ViDAR视觉点云预测赋能大规模端到端自动驾驶
毫米波雷达-视觉融合感知方法(前融合/特征级融合/数据级融合)
自动驾驶仿真框架CARLA教程(3):Car Agent强化学习环境
自动驾驶的规划控制究竟在做什么?我们为什么需要规划控制
【B站首推】2小时掌握ChatGLM-4本地部署-微调-实战,原理讲解+代码解析,超详细,LLM_大模型_微调_-Agent_RAG
【Agent2024最新】Agent零基础入门到实战精通,手把手教你搭建企业级Agent智能体,底层原理技术讲解+项目案例解析+附上源码
数据为王!自动驾驶开源数据体系现状与未来
为什么需要智能体(Agent)
面向下一代自动驾驶:全栈里程碑综述汇总
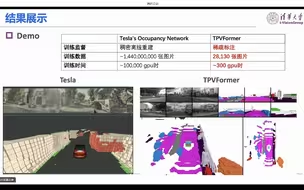
CVPR 2023 面向自动驾驶场景的纯视觉三维语义占有预测
量产基石!MapTR:在线高精地图经典开山之作
一颗CV视觉AI领域的重磅炸弹!仅更改一行代码就让YOLOV11成为了最成熟、效果最好的目标检测模型!
麻省理工开源!LidarDM: 生成逼真、合理连贯的激光雷达点云数据
跟知乎大V一起来学BEV!视觉BEV感知和跟踪算法详解
一文尽览:自动驾驶大语言模型应用综述分享
Qwen大模型本地部署教程!无需GPU,只要5G内存!超简单的部署教程,本地微调一个法律大模型,附安装包和微调文档!
AI大模型上车第一步! SAM如何提升标注效率?
DevDay | VL+Agent:探索AI与硬件融合的无限可能
端到端模型上车了!GraphAD:国内首个可实车量产部署的端到端建模范式
GPT-4V与自动驾驶更配?GPT-4V在自动驾驶中的早期探索!
无序工件上料 01:视觉系统硬件搭建
端到端基础!绕不开的感知模块
逆天了!新加坡国立最新 | 分割任意3D物体
吹爆!这绝对是同济大学最出名的AI Agent系列课程了,零基础阶段必备的前沿AI技术,还不会打造专属大模型智能体来打我!人工智能|机器学习|深度学习|强化学习
【地平线×自动驾驶之心】ICCV 2023最新中稿的端到端自动驾驶框架—VAD!
车辆轨迹有多少种玩儿法?CitySim数据集:轨迹预测、仿真、数字孪生应有尽有!
EM Planner is all u need?
自动驾驶缺少数据怎么办?ChatSim助你生成高度真实的驾驶数据!
特斯拉的World Model是什么?怎么做端到端训练?
这才是科研人该学的【时间序列预测模型】教程,一口气学完LSTM、Informer、ARIMA、Pandas、Transformer!通俗易懂!机器学习|深度学习