V
主页
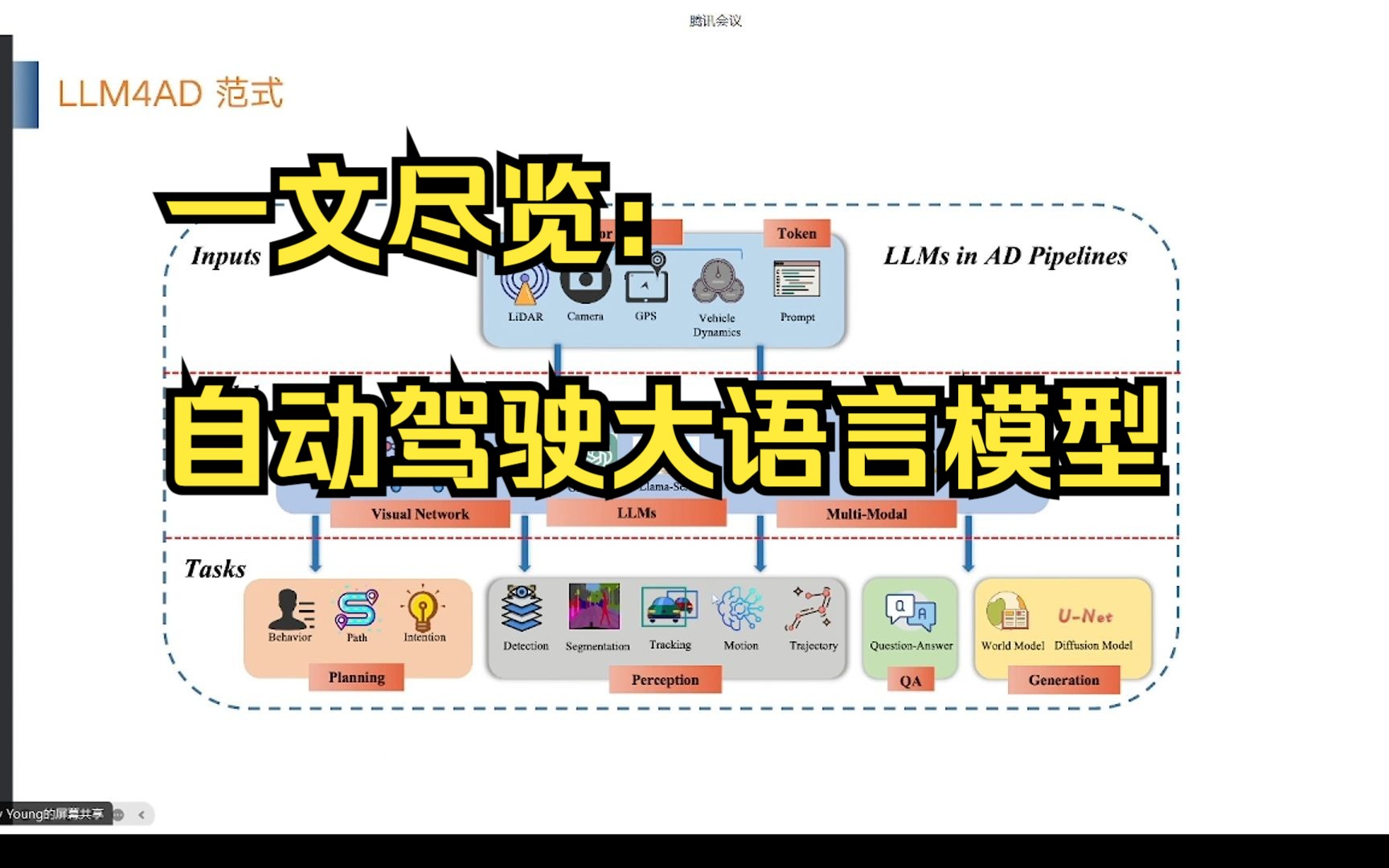
一文尽览:自动驾驶大语言模型应用综述分享
发布人
自动驾驶之心邀请来了上海交通大学在读博士生Jay Young!为大家分享自动驾驶大语言模型应用的最新综述,一览前沿! 精彩内容 1、 LLM在自动驾驶中的应用 2、 LLM4AD最新论文解读与分享 3、 LLM4AD面临的问题与挑战 论文地址:https://arxiv.org/abs/2311.01043 开源地址:https://github.com/Thinklab-SJTU/Awesome-LLM4AD
打开封面
下载高清视频
观看高清视频
视频下载器
从0到1!彻底搞懂BEVFormer算法原理
讲明白了!端到端算法评估指标详解
最新!CoRL 2022 |Waymo分享自动驾驶行为 模型方案
面向下一代自动驾驶:全栈里程碑综述汇总
LLM+自动驾驶还有什么搞头?LLM驱动的智能体应用探析!
看完缓解了我的技术焦虑!自动驾驶的产线标定以及标定间标定方法
自动驾驶的规划控制究竟在做什么?我们为什么需要规划控制
CUDA编程实战教程之:流和事件!彻底搞懂~
看到了这个视频,彻底搞懂了PETR算法!
自动驾驶中的多传感器融合都有哪些方法?基本流程都是什么?
Transformer分割检测大模型技术分享:Transformer基础
拯救你的CUDA!什么是bank,为什么会发生bank conflict???
多模态3D检测相关2D和3D感知基础知识
多传感器融合!BEV感知融合算法介绍
超全干货 | 自动驾驶中的传感器融合:前融合+后融合+特征级融合(方法与策略)
校招和社招转行人必看!2023年如何入局自动驾驶?
分类突破!自动驾驶中的Occupancy感知方法分类
SLAMesh: 基于Mesh地图的实时LiDAR定位与Mesh建图方法分享
还在为数据集发愁?!带你了解自动驾驶常见数据集哪里找!
自动驾驶主流的数据集有哪些?详解Argoverse数据集!
【地平线×自动驾驶之心】ICCV 2023最新中稿的端到端自动驾驶框架—VAD!
牛的!大佬是如何几分钟聊透时空联合规划框架的?
Nuscenes、KITTI等多个BEV开源数据集介绍!
自动驾驶多传感器数据融合(1):什么是多传感器融合?
2022最新!基于激光雷达的3D目标检测综述(超全数据集和SOTA方法汇总)
自动驾驶方向博士申请小白指南,看这个就够啦 !从论文准备到套磁导师!
规划控制都有哪些模块?PNC今年的香饽饽!近10种规控算法与代码实现你都知道吗?
重磅开源!MARS:基于隐式场的场景感自动驾驶仿真
自动驾驶多传感器数据融合(3):单目标跟踪算法
英伟达最新 | OmniDrive:用于3D感知、推理和规划功能的自动驾驶大语言模型
CVPR 2023 | BEVHeight:基于视觉的道路3D目标检测的鲁棒框架
专注于学习PnC的端到端方法详解
【地平线×自动驾驶之心】在线高精矢量化地图构建SOTA方案MapTR v1/v2、LaneGAP
看看顶级大佬如何梳理L2++决策算法的演进-上
经验之谈,轨迹预测真正重要的是什么?
今年的智驾只有一个声音:端到端+大模型
【小白福音】Ollama + AnythingLLM,有手就行本地知识库部署,从安装到部署,手把手教你玩转知识库!
跟着帅小伙一起无痛文献学习-《物流车辆路径优化问题研究综述》
是时候总结一下过去这一年了!看看他们在自动驾驶之心分享了什么
【CVPR 2024】刷爆榜单!SAFDNet:纯稀疏点云检测问鼎Waymo