V
主页
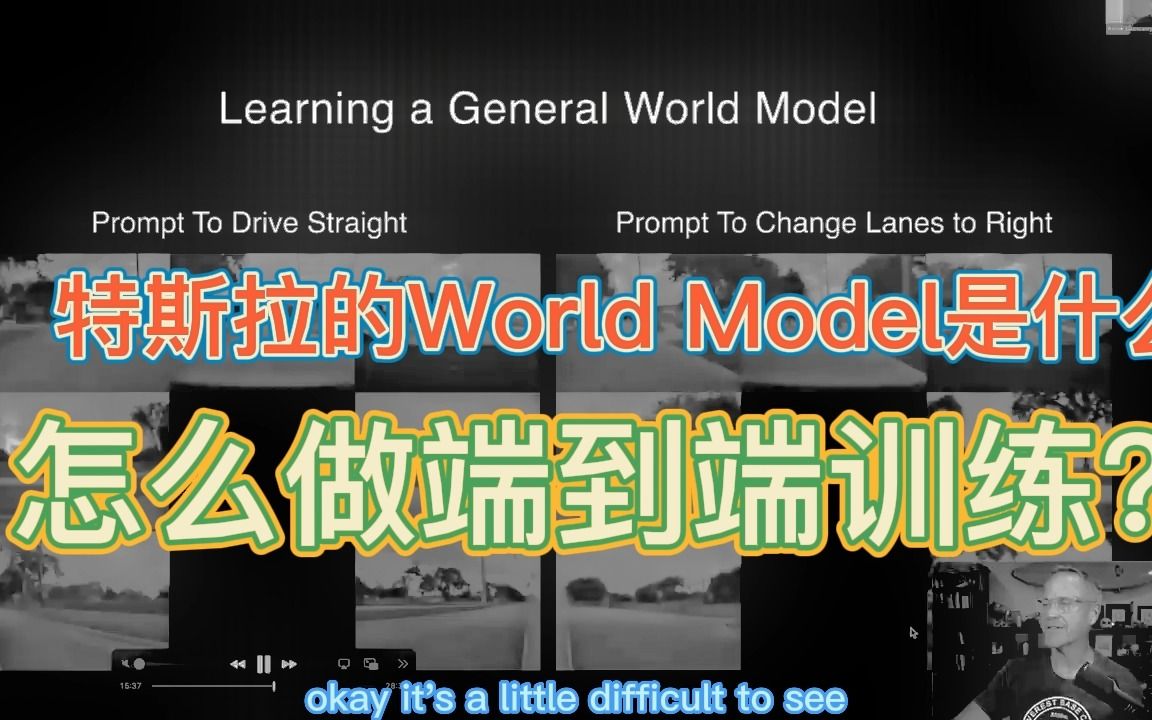
特斯拉的World Model是什么?怎么做端到端训练?
发布人
越来越多的证据表明,特斯拉在其全自动驾驶(FSD Beta)技术方面取得了重大进展:他们正在创建一个基础世界模型,可能通过端到端培训来解决汽车和特斯拉的自主性问题!但对于所有这些术语的含义也存在很多困惑。和我一起来了解世界模型、基础模型和端到端训练到底意味着什么,为什么它们不是3D重建,为什么它们如此重要! https://www.youtube.com/watch?v=svgGsnBkl_o
打开封面
下载高清视频
观看高清视频
视频下载器
端到端算法有哪些优势?完爆传统感知规控?
自动驾驶中的多传感器融合都有哪些方法?基本流程都是什么?
看到了这个视频,彻底搞懂了PETR算法!
看完缓解了我的技术焦虑!自动驾驶的产线标定以及标定间标定方法
数据为王!自动驾驶开源数据体系现状与未来
规划控制都有哪些模块?PNC今年的香饽饽!近10种规控算法与代码实现你都知道吗?
自动驾驶中的多传感器融合有什么优势?如何快速入门到进阶?
为什么说规划控制仍然是端到端自动驾驶的核心?全面复盘规划控制基础及决策规划框架
CUDA编程实战教程之:流和事件!彻底搞懂~
自动驾驶中的多传感器融合状态估计如何建模?
轨迹预测到底预测个啥???轨迹预测入门必备!
分类突破!自动驾驶中的Occupancy感知方法分类
地平线VAD又又又上新了!VADv2比v1强在哪里?一起来听
自动驾驶面试一百问!秋招社招全搞定
R3LIVE++:一个实时鲁棒的紧耦合激光雷达-惯性-视觉融合框架
【地平线×自动驾驶之心】在线高精矢量化地图构建SOTA方案MapTR v1/v2、LaneGAP
量产基石!MapTR:在线高精地图经典开山之作
端到端基础!绕不开的感知模块
EM Planner is all u need?
恶劣天气可拿捏不了我的鲁棒性!AAAI大佬来助攻
讲明白了!端到端算法评估指标详解
【NeurIPS 2023】自动驾驶多模态感知蒸馏新方案来了!
没有BEV特征如何做BEV感知?(旷视团队分享PETRv2/StreamPETR/CMT等SOTA方案)
【CVPR 2024】鉴智机器人算法大佬揭秘3D场景流估计的最新工作——3DSFlabelling
自动驾驶汽车是如何在高精地图中建立精确位置的?
All in 算法并不是最佳职业发展道路?软件基础架构也是必须了解的!
多传感器标定的工具箱有哪些?
端到端趋势下,传统规控还有未来么?
一文尽览:自动驾驶大语言模型应用综述分享
最新!全路段体验特斯拉自动驾驶功能
轨迹预测真正重要的什么?又或者说实际落地的难点在哪里?
TPVFormer:特斯拉occupany network的学术替代方案!清华大学工作
使用YOLOv4完成激光雷达点云下的3D目标检测!
批评理想汽车万言书,一次性说个痛快
端到端,技术战还是口水仗?
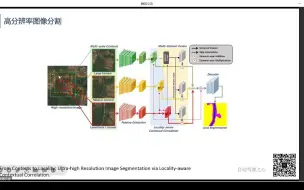
最新,语义分割三十年!基础与前沿进展!
自动驾驶落地离不开的C++!快来实现第一个自动驾驶模块吧
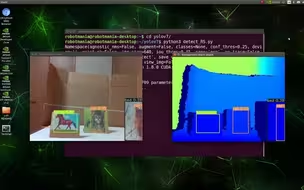
源码实战!使用RealSense和Jetson Nano完成YOLOv7部署
CVPR2023 Highlight | Unisim:Nerf+自动驾驶,这不会是魔法吧?
自动驾驶方向博士申请小白指南,看这个就够啦 !从论文准备到套磁导师!