V
主页
世界模型!特斯拉CVPR2023 Workshop!
发布人
世界模型!特斯拉CVPR2023 Workshop!
打开封面
下载高清视频
观看高清视频
视频下载器
World Model!大火的世界模型到底是什么?
车道线方案第一名!OpenLane Topology自动驾驶挑战赛(CVPRW2023)
CVPR2024最新BEV-Planner:Ego Status对于开环端到端自动驾驶的影响有哪些?
自动驾驶中的多传感器融合都有哪些方法?基本流程都是什么?
自动驾驶中的多传感器融合状态估计如何建模?
CVPR2023 | 利用神经辐射场提升全景三维场景理解的能力
端到端自动驾驶:SparseDrive 算法详解
决策规划都有哪些框架?PNC今年的香饽饽!近10种规控算法与代码实现你都知道吗?
CVPR'23 | OCTraN:非结构化交通场景中的3D占用卷积Transformer网络
还在为数据集发愁?!带你了解自动驾驶常见数据集哪里找!
基于交互感知的自动驾驶车辆轨迹规划——神经网络与模型预估计控制的集成
超逼真的数据!实时高质量渲染,用于动态城市场景建模的Street Gaussians
CVPR 2023 | 通过点云预测作为4D Occupancy 预测的代理
CVPR 2023 | BEVHeight:基于视觉的道路3D目标检测的鲁棒框架
逆天了!NeLF-Pro | 一个方法解决多种规模场景的快速渲染重建(CVPR'24)
牛津大学最新!室内室外SOTA | 用于视觉重定位的地图相对姿态回归(CVPR'24 HighLight)
毫米波雷达视觉算法CRAFT,这次彻底理解了!
端到端趋势下,传统规控还有未来么?
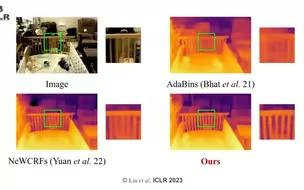
ICLR 2023 |VA-DepthNet:单目图像深度预测的变分方法
CVPR2023 Nuplan自动驾驶轨迹规划比赛第二名方案详解
多模态模型CLIP深度讲解
自动驾驶假数据效果逆天了!Panacea:如何生成全景可控BEV感知数据?
牛津大学IROS2023最新!激光雷达相机外参标定新算法(大幅降低误差)
自动驾驶仿真利器!Street Gaussian:基于3D Gaussian Splatting的动态三维街景建模
今年的智驾只有一个声音:端到端+大模型
OmniDet:环视鱼眼多任务感知网络(深度估计、视觉里程计、语义和运动分割、目标检测和镜头污染检测)
CVPR 2023最新!基于NeRF监督的深度立体视觉
端到端基础!绕不开的感知模块
以特斯拉为案例:自动驾驶仿真框架分析(下,仿真应用/2D检测/3D检测/车道线)
CVPR2022 | SHIFT:当前自动驾驶最大的多任务合成数据集(雾天/雨天/雪天,检测、分割、深度图、实例分割、光流)
自动驾驶安全的关键!| 轨迹预测中的经典模型大盘点
【CVPR 2024】SIN-SLAM:基于神经隐式表征的稠密语义SLAM
CVPR 2023 面向自动驾驶场景的纯视觉三维语义占有预测
2022最新!Nvidia完整阐释自动驾驶中的视觉感知(超赞技术)
最新!CoRL 2022 |Waymo分享自动驾驶行为 模型方案
自动驾驶多传感器数据融合(2):IMU和GPS的融合定位
自动驾驶系统都有什么?PNC今年的香饽饽!近10种规控算法与代码实现你都知道吗?
自动驾驶主流的数据集有哪些?详解Argoverse数据集!
TensorRT部署车道线检测最强算法!Ultra-Fast-Lane-Detection-V2
CUDA编程实战教程之:流和事件!彻底搞懂~