V
主页
快速且鲁棒的深度强化学习导航策略的训练与部署
发布人
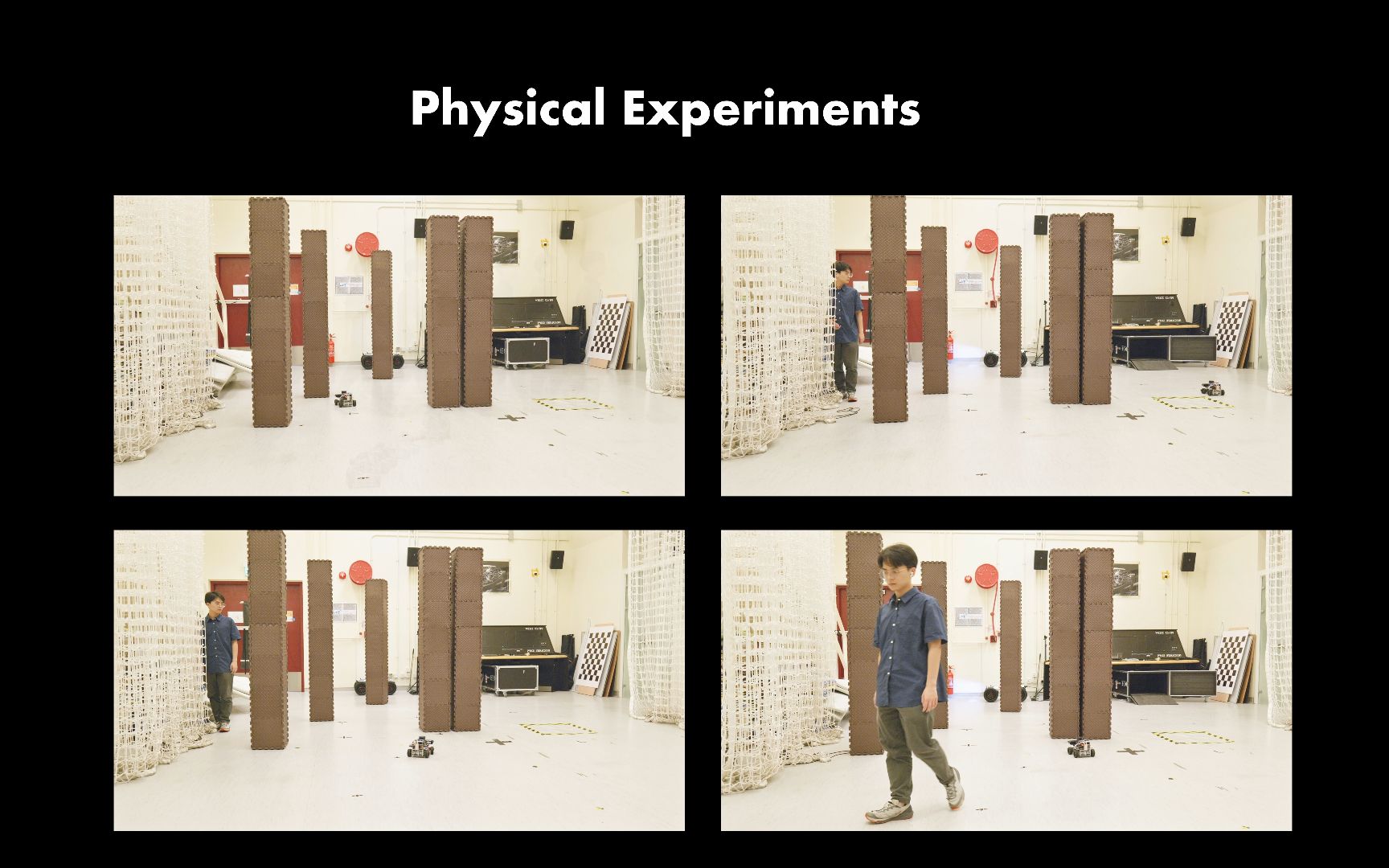
文章标题:Fast and Robust Training and Deployment of Deep Reinforcement Learning Based Navigation Policy 深度强化学习(DRL)在自动移动机器人的控制和导航方面的应用已得到广泛研究。本质上,智能体通过与环境的交互来优化控制策略,该策略将机器人的行为从其输入中映射出来。尽管如此,由于所需的长时间训练和仿真模拟到现实部署的差异,DRL的实际实施面临着重大挑战。在这项研究中,我们在精心设计的模拟场景下训练了一个基于DRL的运动规划器,这些场景能够模拟与人类的物理交互。为了解决上述挑战,我们将人类的经验融入到经验池中,以加速训练的收敛。这也能使智能体获得与动态对象交互的有效策略。此外,为了提高系统的鲁棒性,我们在输入和目标动作网络中都引入了噪声。我们使用仅配备了经济型2D激光雷达和里程计的Ackermann阿克曼移动机器人验证了我们的训练框架的有效性和泛化性。ROS Gazebo模拟和现实世界的实验都展示了所提出的方法的高性能和高效率,强调了其在现实世界导航场景中的潜在应用价值。 The application of Deep Reinforcement Learning (DRL) as a comprehensive solution to automobile control and navigation has seen extensive exploration. Essentially, the agent refines the control policy, which maps the robot's actions from its inputs, by interacting with the environment. Despite this, the practical implementation of DRL faces significant challenges due to the prolonged training time required and the sim-to-real disparity. In this study, we trained a DRL-based motion planner under carefully designed simulation scenarios capable of emulating physical interaction with humans. To address the mentioned challenges, human experiences were incorporated into the experience buffer domain to expedite the convergence of training. It could also enable the agent to acquire effective strategies for interaction with dynamic objects. Furthermore, to enhance the robustness of the system, we introduced noise into both the input and target action networks. The efficacy and generalizability of our training framework were validated using an Ackermann mobile robot equipped solely with an economical 2D LiDAR and odometry. Both ROS Gazebo simulations and real-world experiments demonstrated the high performance and efficiency of the proposed approach, underscoring its potential utility in real-world navigation scenarios.
打开封面
下载高清视频
观看高清视频
视频下载器
无人机降落空中航母平台的轨迹规划(基于凸优化)
无人机时间最优路径点飞行(基于序列凸规划)
原声纯享版,姐姐今天讲SQL 里面Having的用法,快来签到叭|《SQL》第7节
dreamWaq复现尝试
基于运动约束的深度强化学习移动机器人避障
ChatGPT驱动清洁机器人背后依靠强化学习开源项目
Diffusion Policy 结合 PPO 模仿+强化 (下)
用Isaac Lab和OpenUSD加速机器人学习
动画讲解深度强化学习(RL、Q-网络、策略优化、大模型算法入门教程)
强化学习,启动!
RLHF基于人类反馈的强化学习动画讲解(LLM)
尤瓦尔·赫拉利对谈张静初:AI正在制造慢不下来的人
如何用rl_sar采集训练执行器网络的数据
Stanford CS234 2024 Spring | 强化学习 | Reinforcement Learning
[CoRL]使用模仿引导强化学习实现基于视觉的敏捷飞行 | 2024 苏黎世大学
真的超容易“搞深度学习神经网络到底怎么改代码的啊?”复旦博士教我用一本书搞定!
【真机演示】CrossDex:跨具身抓取,用一个策略控制任意的灵巧手
温和的走进深度学习(下)
210:cyber 无人船优化反步控制 轨迹跟踪 强化学习Actor-critic架构,李雅普诺夫稳定性,优化反布控制,强化学习(RL),水面舰艇
太完整了!我居然3天时间就掌握了【机器学习+深度学习+强化学习+PyTorch】理论到实战,多亏了这个课程,绝对通俗易懂纯干货分享!
使用ROS2-Control + RL来控制四足机器人
基于时间序列的人脸检测意图识别的自主喂食机器人系统
【Yao Class Seminar】关于强化学习可解释性的talk
台湾抽象于北辰:要用粘鼠板打败我们的机械狗
基于双目视觉的工业环境中未知动态目标6自由度运动检测与跟踪
【大模型】“你眼前划过的是大模型的一生”
具身智能机械臂实操入门课程-03:机械臂的数据集录制与模型训练
右边两足走路也是双足行走
不会带团队,只能干到死
小机器人拐走12台大机器人
不愧是李宏毅老师讲的【强化学习】简直太详细了!全程干货,通俗易懂,看完就跑通!(人工智能|机器学习|深度学习|强化学习)
【空中课堂】PLC、人机交互、机器人:来看i.MX处理器,如何解决工业自动化中的三大痛点?
这才是小白该学的AI入门教程!上交大教授系统解读【机器学习】+【深度学习】+【强化学习】入门及实战,绝对通俗易懂!
测试行走站立切换和站立抗冲击
CV强化论文分享20241025-01
强化小伙终于起立了
自己组装一台巡检机器人需要多少银两?
2分钟前:山姆·奥特曼确认AGI将于2025年问世!
奔跑有点难度,步态很抽象,大佬们有没有什么好建议
manim所有深奥的数学公式,变成动画片