V
主页
具身智能机械臂实操入门课程-03:机械臂的数据集录制与模型训练
发布人
WowRobo基于 Hugging Face 的 LeRobot 开源项目优化而成,助力具身智能教育,双臂均采用6自由度设计、韩国进口舵机及4096分辨率磁编码器,确保高精度与耐用性。本套免费实操入门课程,涵盖数据采集、模型训练与执行,欢迎关注和购买我们的硬件产品!
打开封面
下载高清视频
观看高清视频
视频下载器
具身智能机械臂实操入门课程-02:相机选型、接线与代码调试
11月新品上线 | 随从臂“眼在手上”整机版本&夹爪摄像头组件重磅推出!
具身智能机械臂实操入门课程-04(完):模型推理和抓取效果验证
[lerobot]使用模仿学习来训练神经网络,让机器人能够自主操作并完成现实世界的任务
Go2迷彩套装
Diffusion Policy 结合 PPO 模仿+强化 (下)
[北理AI分享] 亿点点机器人 Stanford ALOHA的背后
物理AI、机器人与自主性的未来:NVIDIA的全面技术布局
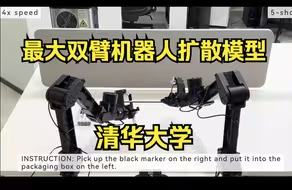
清华重磅开源RDT-1B:全球最大双臂机器人扩散基础模型
Lerobot项目介绍和实操效果
PEGG-Net Isaac Sim Demo
人形机器人格斗比赛?清华x江淮中心联合孵化「零次方科技」双足机器人Z1首次公开亮相!
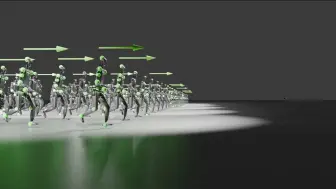
机器人迎来ChatGPT时刻!清华首次发现具身智能Scaling Laws!
RLBench机器人模仿学习大规模测试框架——任务展示
波士顿动力 Spot 足臂协同操作
dreamWaq复现尝试
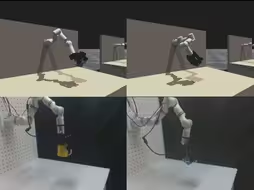
基于模仿学习的机械臂复杂任务实验
AI新作|英伟达:人形机器人!全身控制模式无缝转换
超灵活机械手,上得工厂下得厨房
众擎——旗舰级ENGINEAI SE01人形智能体
【真机演示】CrossDex:跨具身抓取,用一个策略控制任意的灵巧手
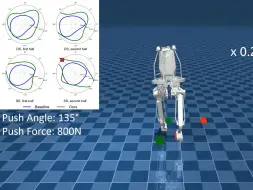
[搬] 稳健的类人机器人行走-通过强化学习增强基于模型的控制
为什么要制造人形机器人?
Nvidia具身最新成果:GR00T-Control引领人形机器人智能控制
科研案例|基于 PyBullet 的具身智能软硬件平台 BestMan
HOVER:多功能神经人形机器人控制器|2024【NVIDIA】
测试行走站立切换和站立抗冲击
用Isaac Lab和OpenUSD加速机器人学习
2040年100亿人形机器人?埃隆·马斯克的未来预言
“星期三”开箱大揭秘!
人工肌肉驱动的人形机器人|2024【Clone】
小鹏AI人形机器人Iron亮相:62个主动自由度,搭载自研AI芯片和灵巧手,已进厂打工!
【研三】自研多模态大模型架构——长时程、高鲁棒
Figure 02 人形机器人在宝马的斯帕坦堡工厂分拣汽车零件 具身智能机器人开始群体协作
《西部世界》重现!机器人复刻人类肌肉骨骼,惊悚科幻震惊网友
RobotKeyframing:四足机器人学习高层次目标的运动|2024【迪士尼】
【36氪】机器人暴打机器人?现在的行业风口具身智能到底是个啥?
Decaying Action Priors for Accelerated Imitation Learning of Torque-Based Legged
NVIDIA Robotics: 从云端到边缘的AI驱动创新
AI 大模型周报 2024年11月 b