V
主页
自己运行部署好的MSC-VO(基于TUM数据集) 20221007_202006
发布人
自己运行部署好的MSC-VO(基于TUM数据集) 20221007_202006,环境是ubuntu18.04 MSC-VO:利用曼哈顿和结构约束进行视觉里程计,基于ORBSLAM2改的 部署运行博文:https://blog.csdn.net/sinat_16643223/article/details/136174815?spm=1001.2014.3001.5501
打开封面
下载高清视频
观看高清视频
视频下载器
在笔记本Ubuntu上运行ManhattanSLAM(基于TUM数据集运行) 20220820_112233 截取视频
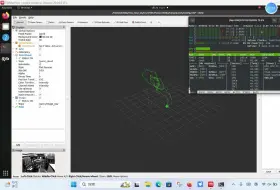
【激光SLAM专题】LOAM如何运行
运行部署好的Structure-PLP-SLAM,实际还有些问题,起来运行不了多久就挂掉了20221007_004441 截取视频
vins不知道怎么调了,飘的一批
NX上静态跑通基于livox mid40的FASTLIO2+ego-planner 20220912_111358 截取视频
基于D435i跑RGBD的ORBSLAM3屏幕录像 2022-08-20 22-27-46
运行Real-Time-PL-VIO 20221224_173042 截取视频
终于画出来咯
轻量级道路特征地图(开源了)
武汉大学博士生分享算法面向室内SLAM场景的点云超分辨率算法(上)
ROS中的目标检测与ORBSLAM结合
同时优化姿态和占用图!Occupancy-SLAM:基于优化的SLAM方法
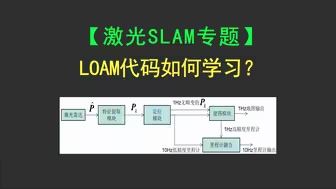
【激光SLAM专题】LOAM代码如何学习
武汉大学博士生分享算法面向室内SLAM场景的点云超分辨率算法(下)
基于bag包跑一下今天刚看到的基于SVO改的SchurVINS 20240417_132838
T265+2D激光点云+octomap_server构建八叉树地图+astar路径规划过走廊 20220605_152950 截取视频
OrinNX上部署运行ROS2版本的vinsfusiongpu 20240429_145424
【激光SLAM专题】LOAM原理通俗易懂
SLAM系列之Fast Livo复现(四)
什么是SLAM?一个小时即可带你入门,从理论到实战,不到五个小时就能搞定,跟着大佬一起嗑代码,太上头了!—视觉slam、计算机视觉、视觉slam实战、自动驾驶
用FAST_LIO2算法跑一下录制的CJLU校园数据集
爬遍全网数据,我叒用AI预测了2024年高考作文题【图灵计划-年更篇】
把基于opencv4的vins-mono前端改为superpoint+光流 20230918_160125 截取视频
满分旗舰!复合型导航机器人强势登场,室内外建图与导航定位专家!
在湖州飞的vinscpu-ego 手动点目标点 20221029
在OrinNX上部署运行PlaneRecNet 对单幅图像进行深度估计和平面检测 20230810_150338 截取视频 截取合并
跟他人学PX4的PID调参录屏 20210423_143805
把RTPL-VIO的前端由EDLines改为MLSD并在线跑起来 20230812_094048 截取视频
基于livox mid 40运行loam-livox 20220906_221318 截取视频
地下矿井巷道SLAM三维重建激光雷达点云建模——So Easy!
基于T265和D435i octomap_server功能包实现octomap增量式建图 20220428_095553 截取视频 截取合并
DPVO testing 0482
地面重建测试 | DLIO+UFOMap
跑CMU的far_planner 还是存在一些问题 屏幕录像 2024-02-29 10:42:24
基于D435i跑PL-VIO 2022-06-25 21-59-39
基于opencv的SGBM对D435i双目做立体匹配输出深度图演示与简单说明 20240326_211324
SLAM系列之Fast Livo复现(五)
跑mono-vo 20230801_221733 截取视频
基于bag包跑港大的dyn_small_obs_avoidance 20230310_220441 截取视频
ubuntu18.04-win10双系统修改开启启动顺序(修改为默认选win10启动)VID_20201111_002250