V
主页
VID_20200730_095518,莲花湖边飞权盛的Pixhawk,第一次实现pixhawk GPS定点飞!!!!!!!昨天其实在院子里已经可以定点模式飞
发布人
2020.7.30 莲花湖边飞权盛的Pixhawk,第一次实现pixhawk GPS定点飞!!!!!!!昨天其实在院子里已经可以定点模式飞了,只是院子GPS信号不够。 实际用的APM固件 APM3.6.11(苍穹四轴给的固件)
打开封面
下载高清视频
观看高清视频
视频下载器
2021弄T265与GPS融合 VID_20210829_100242
由于本人前段时间忙着中考,导致一个月都没有碰遥控,现在已经退步了很多,重新练!
第一次见俄女兵前线实战,可惜了。
双目imu MSCKF 无人机定点飞行测试 20230814
买了无人机之后必入的几个配件!?
第一次实飞两个机子的ego-swarm VID_20220817_152558
基于T265和D435i octomap_server功能包实现octomap增量式建图 20220428_095553 截取视频 截取合并
悟2真的只能飞500米吗
【亚洲特快】:谁的“无人地狱”?
无人机火箭,末端加速测试。
基于T265或vins px4定点指点原理讲解与gazebo仿真演示20240329_122655
ubuntu18.04-win10双系统修改开启启动顺序(修改为默认选win10启动)VID_20201111_002250
武汉航拍——武汉中心环绕
智能无人机课程 7 常用传感器
俄士兵向乌军无人机乞怜遭拒后,被投下炸弹命中裆部
这个俄罗斯侵略者放弃了,只是站着不动让无人机创碎。这对其余侵略者的一个很好的例子,你唯一的出路就是成为乌克兰土的养料
无人机T265(APM树莓派)第一次成功飞!!!
第一次真正意义上APMT265完整定点飞成!!!VID_20200901_145440
无人机33集part2预告
【开源】给ELRS接收机增加自稳功能
无缝剪辑,究竟谁是拍摄者!?
智能无人机课程 9 试飞无人机
确认了整个系统的坐标系是OK的,在T265默认朝北上电的情况下,确认传入传感器更新函数的数据符合ACfly的东北天坐标系VID_20201029_162226
智能无人机课程 12 ros gazebo
空中看华山——奇险天下第一山
基于D435i跑vins+DenseSurfelMapping注意点说明与操作演示20240328_202507
无人机cartographer+move_base VID_20220522_184019
开回环检测跑双目vins-fusion(无IMU) 屏幕录像 2021-12-07 14:52:17
智能无人机课程 18 目标检测和跟踪
两条俄罗斯鲈鱼在Robotyne附近自我清算——其中一条爆头,另一条使用手榴弹
智能无人机课程 17 机器学习和图像处理
发期望姿态+推力实现无人机悬停和走轨迹 VID_20220327_173714
NX上静态跑通基于livox mid40的FASTLIO2+ego-planner 20220912_111358 截取视频
倾转旋翼飞行稳定测试。
APMT265树莓派定点飞行整体流程VID_20200903_150643
ACfly-T265第八次飞行,专门选了个光照好的时间进行专门的定点测试,看看定的如何VID_20201109_133659
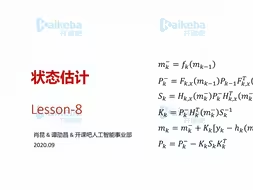
智能无人机课程 8 状态估计
基于D435i跑RTABMAP 20230721_111623截取视频
测试机第二次飞,依旧是室外GPS定点,同时说了些操作的细节VID_20201120_172203
智能无人机课程 2 四旋翼无人机的组成和拼装 上