V
主页
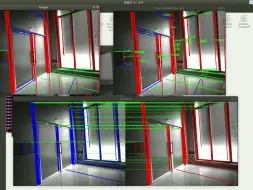
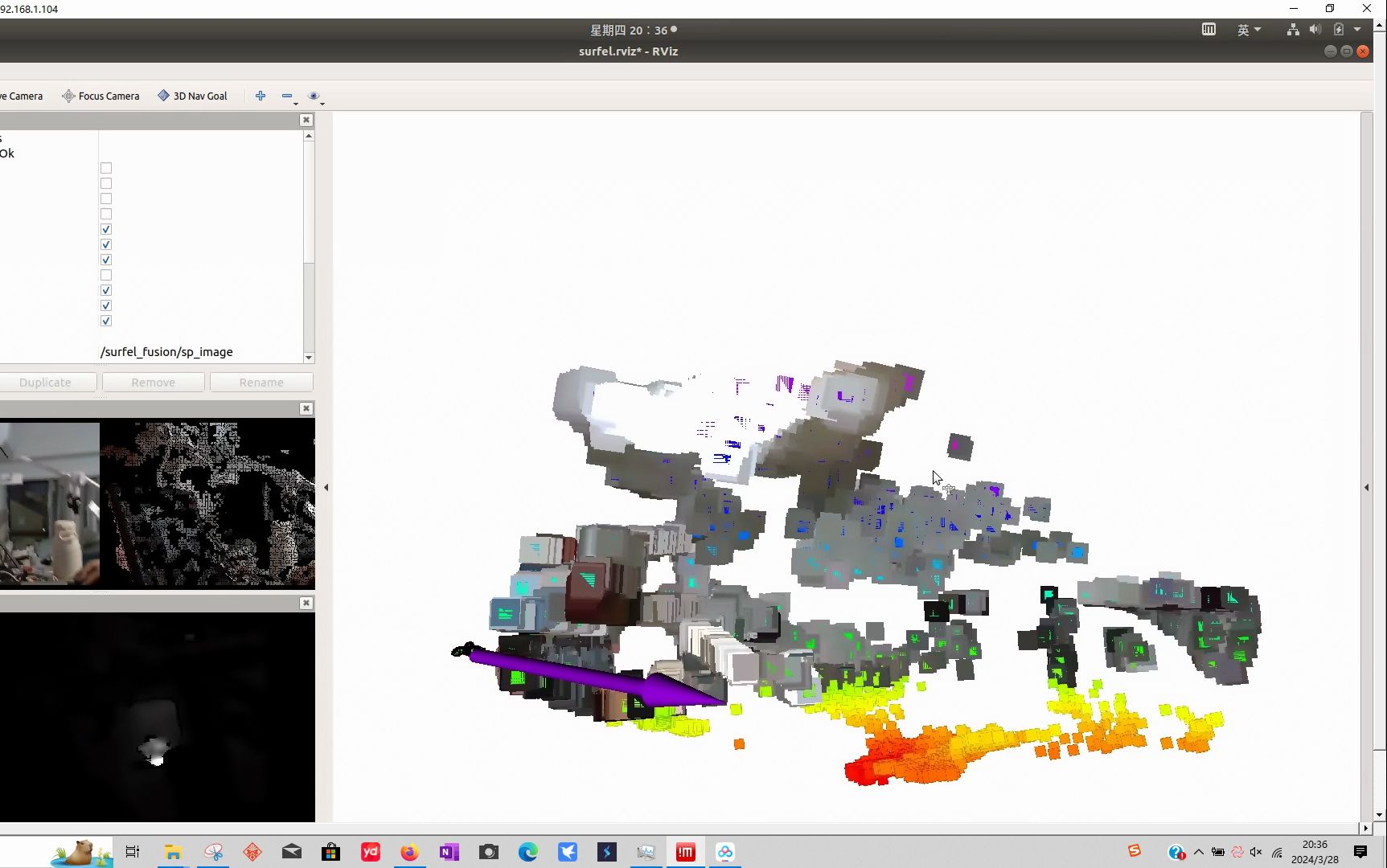
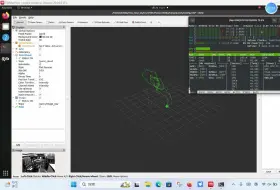
基于D435i跑vins+DenseSurfelMapping注意点说明与操作演示20240328_202507
发布人
基于D435i跑vins+DenseSurfelMapping注意点说明与操作演示20240328_202507 相关博文:https://blog.csdn.net/sinat_16643223/article/details/137079892?spm=1001.2014.3001.5501
打开封面
下载高清视频
观看高清视频
视频下载器
把基于opencv4的vins-mono前端改为superpoint+光流 20230918_160125 截取视频
基于opencv的SGBM对D435i双目做立体匹配输出深度图演示与简单说明 20240326_211324
用fiesta基于位姿和深度图构建ESDF地图操作演示 20240317_091326
基于bag包跑一下今天刚看到的基于SVO改的SchurVINS 20240417_132838
把ego的plan_env模块单独取出订阅位姿和深度图构建自己可用的导航地图 20240315_091408 截取视频 截取合并
用D435i跑PL-VINS屏幕录像 2022-03-05 22-19-01 截取视频
基于D435i跑RTABMAP 20230721_111623截取视频
基于官方data.bag包跑voxblox建图 基于位姿与点云构建ESDF地图 20240315_144153
基于D435i跑RGBD的ORBSLAM3屏幕录像 2022-08-20 22-27-46
基于T265或vins px4定点指点原理讲解与gazebo仿真演示20240329_122655
ubuntu18.04-win10双系统修改开启启动顺序(修改为默认选win10启动)VID_20201111_002250
基于kalibr docker的D435i双目标定和双目IMU联合标定操作演示录屏20220416_125342
开回环检测跑双目vins-fusion(无IMU) 屏幕录像 2021-12-07 14:52:17
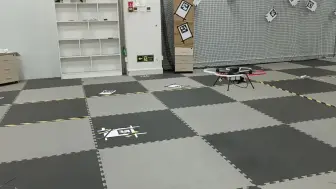
vins飞8字 20221028
基于bag包跑DenseSurfelMapping 屏幕录像 2024-03-03 21:51:35
基于T265和D435i octomap_server功能包实现octomap增量式建图 20220428_095553 截取视频 截取合并
加载之前保存的位姿图跑vins-fusion回环 屏幕录像 2022-06-25 17-00-35
2021弄T265与GPS融合 VID_20210829_100242
垂起固定翼通过mavros实现航点飞行gazebo仿真演示与代码讲解20240524_084947
OrinNX上部署运行ROS2版本的vinsfusiongpu 20240429_145424
ROS2之RTABMap双目建图与导航
跑CMU的far_planner 还是存在一些问题 屏幕录像 2024-02-29 10:42:24
嘉立创SMT BOM元件配单演示20201027_095109
发期望姿态+推力实现无人机悬停和走轨迹 VID_20220327_173714
改前端为基于MLSD+光流进行结构线特征跟踪 前端line_feature跑20221016_2录的D435i包屏幕录像 2023-03-26 13:43:39
一次给他人的MAVROS讲解Screencast 2021-04-09 23_31_52
STlink驱动安装,keil设置,STlink程序烧录,重新上电运行20201027_185231
STM32烧录程序的几种方法(转载)20201011_111257
ACfly的UART驱动程序代码讲解,基于freertos.20201026_233002 截取合并1
基于D435i跑PL-VIO 2022-06-25 21-59-39
三阶倒立摆(转载)20201114_223723
QQ视频20201013214741
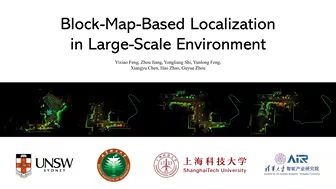
【ICRA 2024】基于分块地图的大场景定位
第一次实飞两个机子的ego-swarm VID_20220817_152558
双目imu MSCKF 无人机定点飞行测试 20230814
无人机cartographer+move_base VID_20220522_184019
我的ACfly F330拆之前再拍一次(更高清)VID_20201027_142832
跟他人学PX4的PID调参录屏 20210423_143805
AVP车库库位建图
第一次飞ACfly-猛禽360 VID_20201103_121832