V
主页
大森林-所有指标全面领先!图像-点云配准最新SOTA!CoFiI2P详细介绍!
发布人
本文介绍了 CoFiI2P,一种用于图像到点云配准的新颖网络。它的核心思想是采用从粗到细的匹配策略,首先在全局层面建立稳健的对应关系,然后在局部层面逐步学习精确的对应关系。此外,CoFiI2P引入了具有自注意力和交叉注意力模块的I2P Transformer ,以增强同质数据和异质数据中的全局感知能力。与直接在点像素层面进行配准的一阶段密集预测和匹配方法相比,CoFiI2P能够过滤掉大量错误的对应关系,并在所有指标上都处于领先地位。在 KITTI 数据集上的大量实验表明,CoFiI2P 在各种环境下都具有准确性、鲁棒性和高效性。 CoFiI2P源码即将开源,感兴趣的小伙伴可以试试,跟踪一下Github的最新进度。
打开封面
下载高清视频
观看高清视频
视频下载器
ICCV2023开源SOTA!2D-3D交错Transformer,性能史诗级增强!
CVPR 2021,点云配准工作!循环多视图对齐网络的无监督表面点云配准!
闭环性能炸裂开源VADv2端到端矢量化自动驾驶新SOTA
NASA JPL团队CoSTAR一大力作:直接激光雷达里程计利用密集点云快速定位
上线一周就2.1k star!单张图像直接转为3D模型!
CVPR2020:级联细化网络用于点云补全(代码开源)
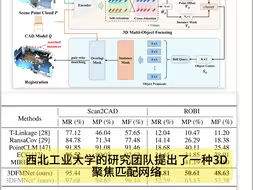
【11.13-arXiv】西北工大提出3D聚焦多实例点云配准网络!2024年11月13日arXiv cs.CV发文量约87余篇,减论Agent通过算法为您推荐
[CVPR2020] SpSequenceNet:4D点云语义分割网络
点云3D深度学习模型与实践
3DGS进化,高效高质量的GaussianPro来袭!
ECCV'24开源 完虐COLMAP!百倍加速!ACEZero:全新SfM革新三维重建!
3DGS SLAM最新SOTA | 使用视觉、深度和惯性测量进行SLAM的多模态3DGS
[ICRA2021] SDK:基于深度学习和显著性估计的点云关键点检测
Depth Anything!最强开源单目深度估计SOTA!
IROS 2021 | PTT-Net:基于Transformer的开源3D点云目标跟踪网络
五分钟开发一款自己的点云处理软件(python)
ICRA2020论文,基于CNN和点云分割的LiDAR-SLAM点云回环检测方法
SAR-Net:用于类别级6D对象姿势和大小估计的形状配准和恢复网络
上交最新开源!仅需4张图像实现高质量3D重建!
清华最新开源万能3D分割一切!
SOTA级的法线贴图和深度图预测,Lotus的ComfyUI实现和对比
最新CVPR2020论文:SuperGlue(超级胶水):用图神经网络来做图像匹配,超越现有所有匹配算法
极快跟踪一切!DOT:无惧遮挡!
107 FPS!开源!结合ICP和3D GS构建最快的稠密SLAM!
CoherentGS:从稀疏的输入图像中重建高质量的3D场景
MIT重磅开源!别再用COLMAP了!FlowMap给你最精确的SfM!
别再用SuGaR了!重磅开源SA-GS:重新定位最新大场景3D重建SOTA(上篇)
ECCV2022 SQN:大规模3D点云的弱监督语义分割
你可以控制图像中的一切!Image Sculpting:精确编辑图像中的任何目标!
吊打ORB3!73Hz!南洋理工重磅开源AirSLAM:无惧复杂光照的超强点线视觉SLAM!
ECCV 2024 Oral满分论文|PointLLM:大语言模型直接理解点云(上篇)
三维重建大一统!LSM:无需先验位姿,首次实现实时语义3D重建!
最新CVPR2020论文:Deep Global Registration基于深度学习的3D点云全局匹配:!
CVPR2022 BEVFormer:通过时空Transformer从多相机图像中学习鸟瞰视角表示
CVPR2021,基于多视点鱼眼图像的实时球面扫描立体成像
CVPR2022:GAN监督的密集视觉配准用于多种AR应用
EagerMOT,通过传感器融合进行3D多目标跟踪(ICRA2021)
英伟达最新开源|EmerNeRF全面基于NeRF的自动驾驶仿真框架无需分割!
什么?不做时间同步也可以实现LiDAR-相机三维重建?
NeurIPS 2021:利用神经网络从单个 RGB 图像重建全景 3D 场景