V
主页
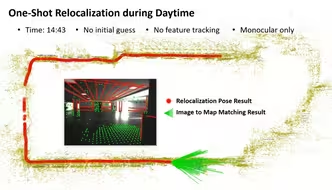
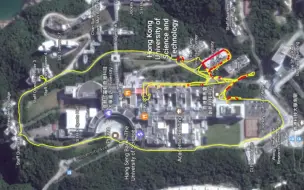
ICRA2020论文,基于CNN和点云分割的LiDAR-SLAM点云回环检测方法
发布人
https://www.youtube.com/watch?v=djf7vGtf7CA 本文提出了一种基于因子图的3D LiDAR SLAM系统,组合了SOTA深度学习的基于特征的回环检测子,使得腿式机器人能够在工业环境中定位和建图。点云先通过惯性运动学状态估计器对齐,然后再使用ICP配准对齐。为了闭环,使用了一种回环策略来匹配工业环境中的分割块和点云!实验结果证明了该方法的鲁棒性和灵活性! 注:另有同名微信公众号,欢迎点赞+关注!在公众号「3D视觉工坊」后台,回复「RRDL」获取论文链接!
打开封面
下载高清视频
观看高清视频
视频下载器
107 FPS!开源!结合ICP和3D GS构建最快的稠密SLAM!
英伟达最新开源|EmerNeRF全面基于NeRF的自动驾驶仿真框架无需分割!
无需额外训练!SAMPro3D:零样本3D分割一切!
香港大学发表超强无人机实时避障算法:以后无人机再也不怕撞了!
ORB-SLAM3基本原理与系统架构
20+FPS!最新开源!加上回环检测的NeRF SLAM竟是如此精确!
港大火星实验室:在大规模杂乱的3D环境中进行快速无人机探索方案
点云3D深度学习模型与实践
Nature子刊!MARS实验室最新开源:基于LiDAR点流的运动事件检测!
[ICRA2021] SDK:基于深度学习和显著性估计的点云关键点检测
MA-LIO:使用逐点 LiDAR 间不确定性传播的异步多LiDAR 惯性里程计
R3LIVE:一个健壮、实时的Lidar-IMU-视觉紧耦合顶尖SLAM框架
Mobile-Seed:联合语义分割和边缘检测!
吊打ORB3!73Hz!南洋理工重磅开源AirSLAM:无惧复杂光照的超强点线视觉SLAM!
清华最新开源万能3D分割一切!
ICCV 2023 oral|一文看懂SLAM/ SfM遇到相似非回环场景应该如何处理
VINS-Fusion-回环检测
KITTI上准确率第二,具有GPU加速GICP匹配代价因子的全局一致的3D LiDAR映射
ECCV2022 SQN:大规模3D点云的弱监督语义分割
NTU开源 | AirSLAM:高效且 光照稳健的点线视觉SLAM系统 嵌入式运行速度可达40HZ
SIGGRAPH'2024|RTG-SLAM:基于3DGS的大尺度场景实时三维重建-上篇
激光-视觉-IMU-GPS融合SLAM系列课程-传感器介绍与代表性SLAM解析
ICRA2022:全局一致且紧密耦合的 3D LiDAR 惯性建图
高通提出无监督和跨单元部署的实时、准确、一致的视频语义分割
MIT最新突破!SplaTAM:实现高速SLAM与实时3D渲染的全新方法!
ICCV 2023|第一种稀疏的仅视觉的交叉视图定位方法!
NeRF何去何从?GS SLAM到底哪家强?来看看最新的开源方案!
如何处理视觉SLAM长期定位中的外观变化和轨迹漂移?
自动驾驶中多个小视场固态激光雷达不依赖参照物的外参标定(代码即将开源)
NASA JPL团队CoSTAR一大力作:直接激光雷达里程计利用密集点云快速定位
大作业|激光-视觉-IMU-GPS融合SLAM算法
详解深度学习如何使用自己的数据集跑通项目并改进,图像分类、分割、检测等项目具体实例讲解
高斯抛雪球SLAM
ICRA2022:自适应环境的移动机器人自主导航
三维点云系列视频——第一章绪论
厦门大学:使用可穿戴 IMU和LiDAR的大规模室内外4D场景捕获
神经辐射场照亮动态SLAM:构建精细场景地图
MIT工作:Kimera,新的实时度量语义的开源SLAM系统(ICRA2020)
Hovermap,可手持、车载、机载的多平台智能SLAM数据采集系统
MIT重磅开源!别再用COLMAP了!FlowMap给你最精确的SfM!