V
主页
EagerMOT,通过传感器融合进行3D多目标跟踪(ICRA2021)
发布人
https://www.youtube.com/watch?v=JK6LR4iiA8Y 现有的多目标跟踪方法依靠深度传感器(例如,LiDAR)来检测和跟踪 3D 空间中的目标。但往往深度传感器的信号较为稀疏,只能达到有限的传感范围。另一方面,相机提供密集而丰富的视觉信号,有助于定位远处的物体,但仅限于图像域。本文提出了 EagerMOT,整合了来自两种传感器模式的所有可用对象观察结果,在多个数据集上都取得了最先进的结果!
打开封面
下载高清视频
观看高清视频
视频下载器
极快跟踪一切!DOT:无惧遮挡!
CVPR2024开源NetTrack:跟踪高动态物体!
CVPR'24开源 ADA-Track端到端3D多目标跟踪最新SOTA!
自动驾驶中常用传感器硬件介绍
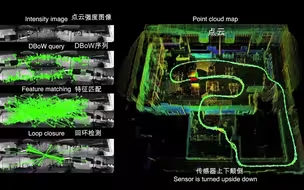
最新ICRA2021论文,基于成像激光雷达的稳健位置识别,代码开源!
CVPR'24开源 MASA万能匹配一切、跟踪一切!
无人机自主探洞!大规模三维环境中无人机基于图的拓扑探索规划(ICRA2021)
ICCV 2023开源 最新跟踪一切!分割一切视频版来了!
有了这个算法,你的无人机再也不怕撞鸟了,IROS2021,事件相机+目标检测+轨迹预测!
FUTR3D:统一的传感器融合框架
04 自动驾驶中多传感器信息融合理论(上篇)(Camera + LiDAR + Radar + IMU)(三)
Splatam:用于稠密RGB-D SLAM的3D高斯的溅射、跟踪和建图
03 自动驾驶中多传感器同步理论(Camera + LiDAR + Radar + IMU)(上篇)
05 自动驾驶中多传感器信息融合理论(下篇)(Camera + LiDAR + Radar + IMU)
[ICRA2021] SDK:基于深度学习和显著性估计的点云关键点检测
大模型时代下的端到端自动驾驶(上篇)
Depth Anything!最强开源单目深度估计SOTA!
交叉注意力机制+特征融合,模型准确率100%!
IROS 2021 | PTT-Net:基于Transformer的开源3D点云目标跟踪网络
ICRA2021,基于 LiDAR 的高效、鲁棒深度学习端到端的自动驾驶导航控制,大幅减少接管次数(代码开源)
SCIROBOT2023 港大开源一种用于自主导航的具有扩展传感器视场的自旋转单驱动无人机!
ICCV 2023开源 屠榜Waymo!超强3D目标检测范式DetZero!
大作业|激光-视觉-IMU-GPS融合SLAM算法
三维重建大一统!LSM:无需先验位姿,首次实现实时语义3D重建!
04 自动驾驶中多传感器信息融合理论(上篇)(Camera + LiDAR + Radar + IMU)(二)
ICRA2021,OmniDet:用于自动驾驶的基于环视摄像头的多任务视觉感知网络
02 自动驾驶中常用传感器硬件介绍(Camera + LiDAR + Radar + IMU)(中篇)
你可以控制图像中的一切!Image Sculpting:精确编辑图像中的任何目标!
激光-视觉-IMU-GPS融合SLAM系列课程-传感器介绍与代表性SLAM解析
ICCV 2021:几行代码实现性能提升,目标检测中的旋转不变性
06 自动驾驶中实战基础之3D-2D求解方法(PnP系列)[Camera + LiDAR + Radar + IMU]
港科大最新 开放词汇3D物体检测新SOTA-CoDAv2p-下篇
[CVPR2022] ICG:融合区域和深度以实现无纹理对象的高效3D跟踪
ICRA2022:全局一致且紧密耦合的 3D LiDAR 惯性建图
3DGS进化,高效高质量的GaussianPro来袭!
107 FPS!开源!结合ICP和3D GS构建最快的稠密SLAM!
北大工作!基于事件相机的视频帧重建和超分辨率(ICCV2021)
ECCV'24开源 完虐COLMAP!百倍加速!ACEZero:全新SfM革新三维重建!
SLAM里程碑!戴森机器人实验室最新开源:3D GS杀入SLAM!
CVPR2021,FFB6D:用于6D位姿估计的全流双向融合网络,代码开源