V
主页
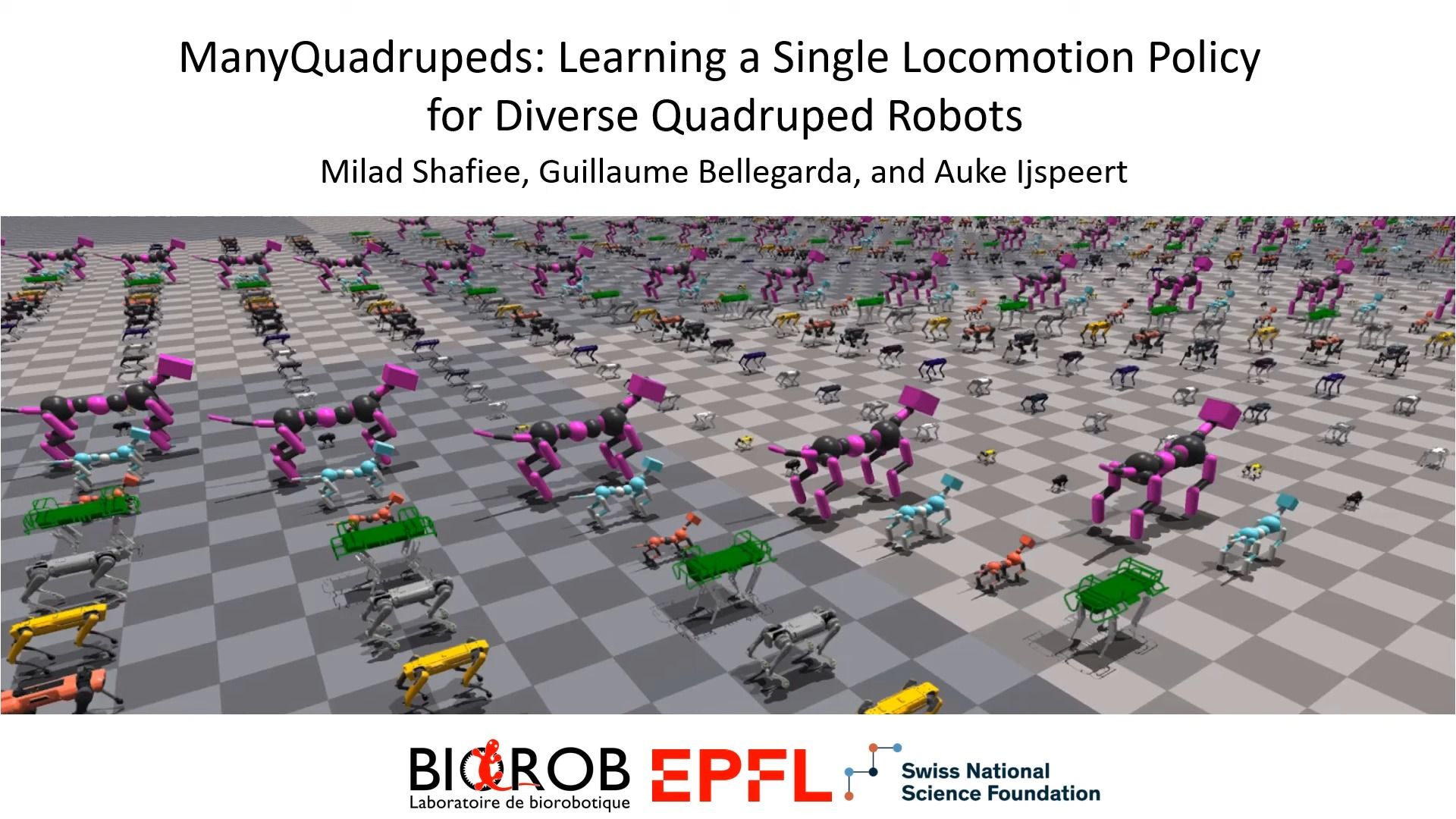
EPFL 四足机器人研究 —— ManyQuadrupeds: 多种类四足机器人学习运动策略(ICRA 2024)
发布人
学习四足机器人的运动策略传统上受限于特定的机器人形态、质量和尺寸。学习过程通常必须针对每个新机器人重复进行,超参数和奖励函数权重必须重新调整,以最大限度地提高每个新系统的性能。另外,试图训练一个单一策略来适应不同大小的机器人,同时保持相同的自由度(DoF)和形态,要么需要复杂的学习框架,要么需要对质量、惯性和维度进行随机化,这就会导致 导致训练时间延长。在我们的研究中,我们证明了从动物运动控制中汲取灵感,可以有效地训练出能够控制各种四足机器人的单一运动策略。机器人的差异包括:自由度数量可变(即 12 或 16 个关节)、三种不同的形态、从 2 千克到 200 千克的广泛质量范围以及从 18 厘米到 100 厘米的标称站立高度。我们的策略调节脊髓中的中央模式发生器(CPG),有效协调中央模式发生器的频率和振幅,产生有节奏的输出(节奏生成),然后映射到模式形成(PF)层。在不同的机器人中,唯一变化的部分是 PF 层,它调整步幅高度和长度的缩放参数。随后,我们通过在 Unitree Go1 和 A1 机器人上测试单一策略来评估模拟到现实的转换。值得注意的是,我们观察到,即使添加相当于 A1 机器人标称质量 125% 的 15 千克负载,也能实现稳定的性能。
打开封面
下载高清视频
观看高清视频
视频下载器
ETHZ 四足机器人研究 —— 学习具有风险意识的运动(ICRA 2024)
ETH + Oxford 四足机器人研究 —— 野外视觉导航的快速可穿越性估计
佐治亚理工学院研究 —— 人体动捕训练四足机器人(类人动作,如打网球)
MIT 机器人讲座 —— MuJoCo MPC (MJPC) 介绍
ETH + NVIDIA 研究 —— Orbit: 交互式机器人学习环境的统一仿真框架
斯坦福开源 - 机器人技能学习 通用接口UMI - 机械夹爪装配教程
斯坦福大学开源 - 机器人技能学习 通用操作接口 UMI (Universal Manipulation Interface) Demo
CMU 研究 —— 学习对人形机器人的实时全身遥操作
EPFL 机器人研究 —— 视觉CPG-RL: 学习视觉引导的四足机器人运动CPG(ICRA 2024)
斯坦福开源 - 机器人技能学习 通用接口UMI - 机械夹爪 3D 打印教程
开源人形机器人强化学习训练框架!星动纪元联合清华大学、上海期智研究院发布Humanoid-Gym!
普林斯顿 IRoM 机器人研究 —— 自信感知: 基于学习的感知为导航提供安全保证(2024 开源)
ETH ICRA 2024 - 多无人机分散式森林快速探索
ICRA 2024 全部论文及下载方式
迪士尼机器人技术展示 —— Duke
斯坦福大学研究 - 用于机械手设计的动力学扩散模型
ICRA 2019 轮式四足机器人的全身运动控制与规划
UCSD 机器人讲座 —— 人形机器人的关键技术 + 基于模型 VS 学习的控制
ETH 讲座 —— 机器人的感知和学习:ML 最佳实践项目
宾大 GRASP 讲座 —— 机器人中的具身人工智能
斯坦福大学 —— 机器人与具身人工智能实验室
NVIDIA 软硬件开发的人形机器人(From AVs to Humanoids)
德国宇航中心(DLR)人形机器人 neoDavid
迪士尼研究 —— 鲁棒神经运动控制器的轨迹增强
MIT 机器人研究 —— 机器人灵巧操作
UIUC 机器人讲座 —— 机器人学习:通过理解第一视角视频(Robot Learning by Understanding Egocentric Video)
四足机器人 ANYmal 的应用 —— 芬兰检测核安全
开源 机器人操作数据集 —— DROID: 大规模机器人操作数据集
右边两足走路也是双足行走
意大利 IIT 讲座 —— 结合学习和模型预测控制的机器人安全控制
人形机器人控制及仿真
苏黎世联邦理工学院 圣诞老人联合 ANYmal 大战实验室恶霸: 在 RSL 进行节日对决!eth 苏黎世联邦理工学院 四足机器人
ETH研究 —— 利用纳米无人机群进行分布式测绘的全机载 SLAM
MuJoCo 苍蝇仿真 Jupyter Notebook
实时最优控制讲座 —— Crocoddyl 教程
OpenAI + 1X 人形机器人做家务(VR)
强化学习四足机器人三
NVIDIA Isaac 讲座 —— 使用 ROS 2 控制自主移动机器人
MIT 欠驱动机器人学 2024 第 5 讲 Acrobots, Cart-poles, and Quadrotors I
慕尼黑工大机器人研究 —— 人工神经假肢控制系统