V
主页
京东 11.11 红包
100~200人的公司就想做L4的自动驾驶服务,太不知天高地厚了
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
【德国图宾根大学-自动驾驶课程】目标检测——5_3D目标检测1
投资特斯拉消逝的四年
NOA智驾水平第一
哪个实验室要发sci的? 我们有专业团队
【德国图宾根大学-自动驾驶课程】自动驾驶的历史
【德国图宾根大学-自动驾驶课程】重建与运动——3光流
【德国图宾根大学-自动驾驶课程】重建与运动——1对极几何与图像矫正
“高时薪”并非行业红利,更不是老板人好!
吃相愈发难看,新能源汽车之争进入白热化
具身智能的风口到了吗
【德国图宾根大学-自动驾驶课程】目标检测——3滑动窗口与梯度方向直方图
2024终于有科研大佬把“你的科研能力从什么时候开始突飞猛进的?”讲清楚啦!
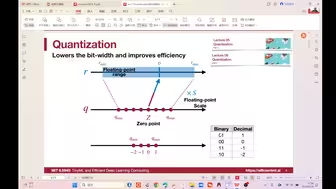
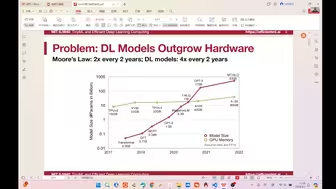
【MIT的模型压缩与优化课程】12.3Transformer和LLM——LLM的量化:SmoothQuant和AWQ
「Github一周热点43期」面向LLM的爬虫、网页一键变APP、开源金融分析工具等
特斯拉人形机器人工厂上班的一天🤖
本科计算机自学指南&非科班转码指南[经验分享|自学计算机(CS/SE...)]
【德国图宾根大学-自动驾驶课程】道路分割与车道检测——2道路分割
自动驾驶不是让你不用看路,这种还不吊销驾照吗
计算机视觉与SLAM的区别
道路分割与车道检测——1介绍与挑战
学完即可就业!一口气刷完3D点云、车道线检测、轨迹预测、三维重建、环境感知、深度估计、关键点特征匹配、行人重识别等八大自动驾驶算法与实战!真的比刷剧还爽!
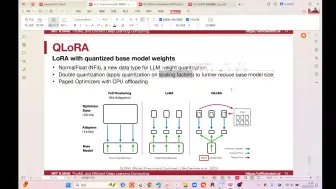
【MIT的模型压缩与优化课程】12.7Transformer和LLM——常见的微调方式:Lora/Qlora/Adapter/PromptTuning
计算机视觉与图形学的区别
【计算机博士带你啃书】白话讲解周志华机器学习西瓜书
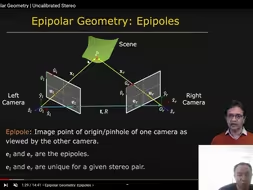
【哥伦比亚大学CV课程】012未校正的立体视觉——2对极几何约束
1分钟看完马斯克发布会,机器人擎天柱炸场,AI无人车让司机下岗
【德国图宾根大学-自动驾驶课程】目标跟踪——4整体理解
强推!我敢保证这是B站最全的(python+机器学习+深度学习)系列教程,3小时就能从入门到精通,通俗易懂,小白也能学得会!人工智能|深度学习|计算机视觉
特斯拉机器人在向大家展示自己的力量
【德国图宾根大学-自动驾驶课程】目标检测——2性能评估
【全874集】目前B站最全最细的ChatGPT零基础全套教程,2024最新版,包含所有干货!一天就能从小白到大神!少走99%的弯路!存下吧!很难找全的!
【多伦多大学—自动驾驶课程】状态估计与定位week1-最小二乘法:1谷神星的发现与普通最小二乘法
【德国图宾根大学-自动驾驶课程】里程计与SLAM——5定位:卫星定位,视觉定位,地图定位
【德国图宾根大学-自动驾驶课程】目标检测——1介绍
路径规划|基于维诺图的路径规划算法(ROS C++/Python/Matlab实现)
纯步进无差别跑图
这位同学,人工智能算是被你玩明白了...老师快被气晕了!
【MIT的模型压缩与优化课程】2.0神经网络基础——常见的各种算子
特斯拉新发布的机器人已经有点那啥了‼️
武汉特产苕萝卜开会研究路况