V
主页
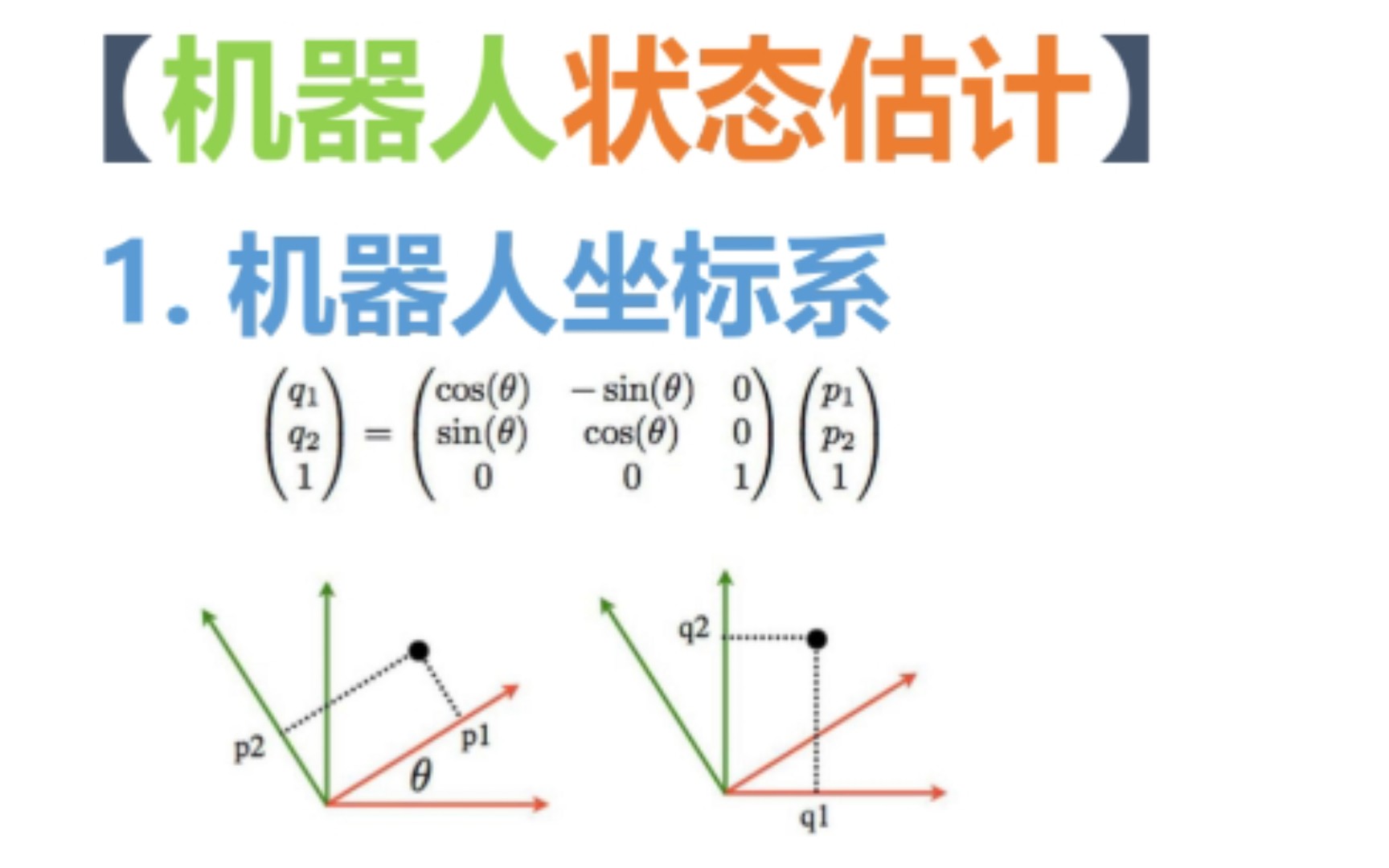
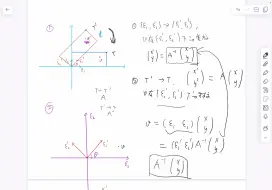
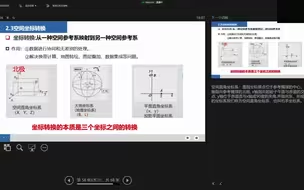
【机器人状态估计】1. 机器人坐标系 变换矩阵 旋转矩阵 世界坐标系 运动坐标系
发布人
坐标系是机器人的基础 也是很多人容易懵逼的地方 这节课做一个相对系统的总结
打开封面
下载高清视频
观看高清视频
视频下载器
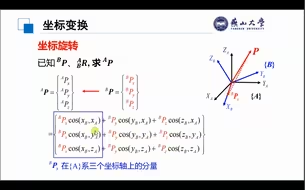
机器人学 l 2.2 坐标变换
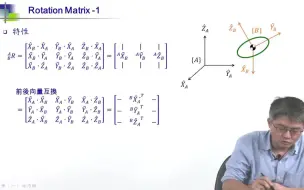
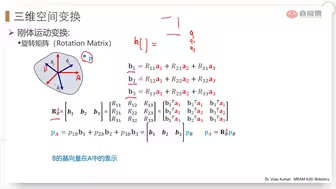
2. 旋转矩阵
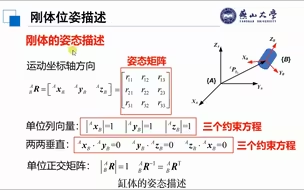
机器人学 | 2.1 机械臂的位姿描述(重点为旋转矩阵)
矩阵变换-三维坐标系
【EPSON机器人】SCARA机器人坐标系详解
3. 变换矩阵
2-2 旋转矩阵
刚体变换与坐标系变换的区别以及求坐标和矩阵
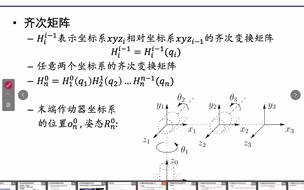
【机器人学】1-数学基础-1.2 空间位姿和齐次变换矩阵
相机各种坐标系关系及转换公式(自用)
【机器人理论最好中文入门课程 没有之一】 机械臂 系统 结构 旋转矩阵 变换矩阵 DH模型 运动学正逆解 轨迹规划 动力学 控制 遥控操作 教程
机器人学 机器人技术 期末复习(涵盖机器人运动学和机器人动力学部分)
机器人学之位姿变换、齐次变换、坐标变换
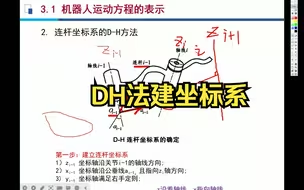
3-3DH法建坐标系
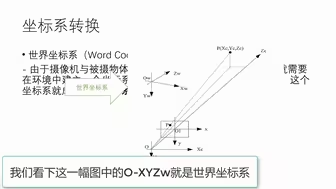
坐标系的转换
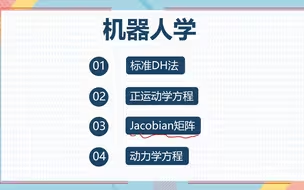
机器人DH法、运动学、雅克比(Jacobian)矩阵
3D数学基础:矩阵和变换
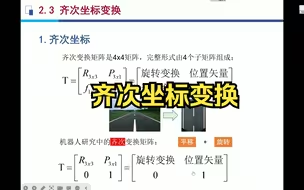
2.4 平移和旋转齐次坐标变换
从坐标变换来初步认识线性变换的矩阵相乘
【机械臂运动学教程】机械臂+旋转矩阵+变换矩阵+DH+逆解+轨迹规划+机器人+教程
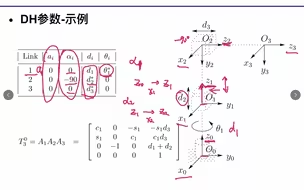
空间机器人技术-建模与控制基础:13.DH参数举例
利用线性变换看旋转矩阵
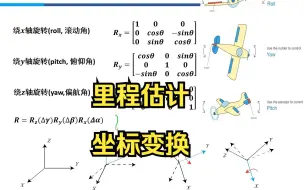
6-1里程估计-坐标系变换
移动机器人-1.2-姿态与旋转矩阵
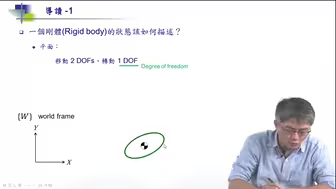
【机器人学】1-数学基础-1.1-空间位置和姿态
【机器人状态估计】2. 为什么引入李群流形 李代数 求导 微分 四元数
空间机器人技术-建模与控制基础:12.DH坐标系与DH参数
3.2-刚体运动坐标转换1
机器人状态估计
【线性代数】矩阵变换 - 旋转
导航中坐标系变换的数学表示(一)-方向余弦矩阵
第三章-认识坐标系 大研机器人
三维重建第三课:相机标定原理步骤(一)坐标系变换
透彻理解旋转矩阵
2-3齐次坐标变换
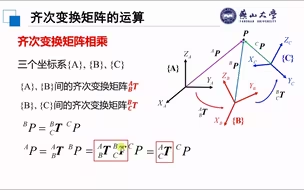
机器人学 | 2.4 齐次变换矩阵的运算(矩阵相乘与矩阵求逆)
学习记录 机器人状态估计-第二章
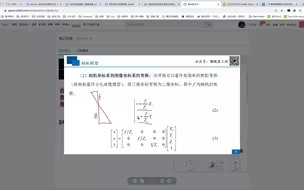
2-2坐标变换
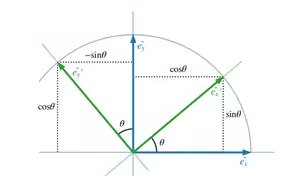
【矩阵分析】二维旋转矩阵的推导(极坐标/基变换)
旋转坐标轴下的坐标变换