V
主页
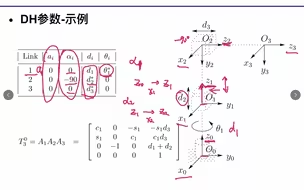
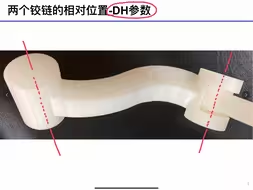
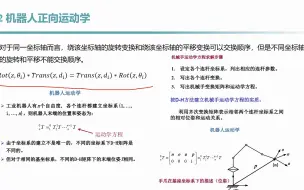
空间机器人技术-建模与控制基础:12.DH坐标系与DH参数
发布人
这是面向大三学生的入门课程,视频作为课堂教学的补充。目前仅录制了固定基座机械臂的运动学部分。水平有限,请多指教~ DH参数的补充视频: https://www.bilibili.com/video/BV1KJ411c7qe https://www.bilibili.com/video/BV1nJ411M7Xa
打开封面
下载高清视频
观看高清视频
视频下载器
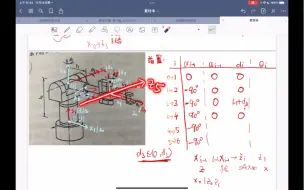
空间机器人技术-建模与控制基础:13.DH参数举例
【机器人机构学】DH参数法讲解-基于定义出发
空间机器人技术-建模与控制基础:3.旋转矩阵(坐标转换矩阵)
机器人学:建模、控制与视觉——华中科技大学
两分钟学习:四足机器人DH参数法
机器人DH参数建模助手-实时显示模型变化-matlab+RTB
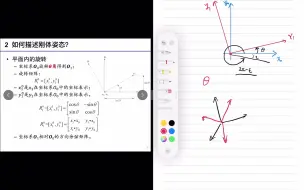
空间机器人技术-建模与控制基础:2.刚体的位置和姿态
空间机器人技术-建模与控制基础:5.旋转矩阵的作用-坐标转换
补充2.3_空间机器人技术-动力学与控制-DH坐标系与DH参数
机器人学DH参数的最直观讲解机器人入门必备
机器人DH法、运动学、雅克比(Jacobian)矩阵
空间机器人技术-建模与控制基础:10.运动学简介
空间机器人技术-建模与控制基础:16.速度级运动学的基本内容
空间机器人技术-建模与控制基础:15.URDF文件
空间机器人技术-建模与控制基础:14.位置级逆运动学
空间机器人技术-建模与控制基础:9.齐次矩阵
空间机器人技术-建模与控制基础:11.最少坐标系的选取原则
手写六自由度的机械臂DH参数建模,可以代入DH矩阵中,从而进行正逆解
六自由度机械臂讲解(含DH模型与正逆运动学讲解)
空间机器人技术-建模与控制基础:1.概述
4-1机器人速度雅可比矩阵
【搬运】关于机械臂D-H法转换矩阵参数简单易懂的讲解
空间机器人技术-建模与控制基础:8.姿态参数
六自由度工业机器人DH建模与逆运动学仿真
机器人 运动学 基础 经典DH变换
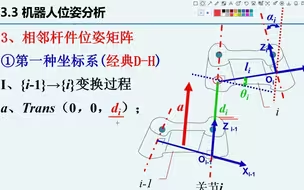
补充2.2_空间机器人技术-动力学与控制-DH参数的物理意义
机器人 运动学 D-H经典方法和改进D-H方法参数表建立
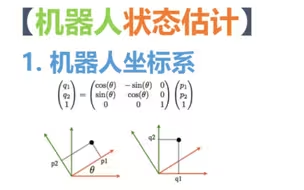
【机器人状态估计】1. 机器人坐标系 变换矩阵 旋转矩阵 世界坐标系 运动坐标系
空间机器人技术-建模与控制基础:7.旋转的复合
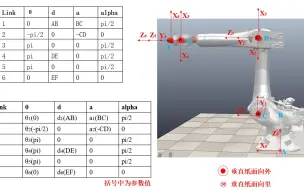
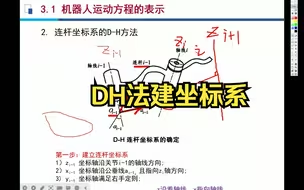
3.2 机器人DH参数表达法
3-3DH法建坐标系
机械臂之DH参数法
机器人学 1.19 标准DH参数
3-13Matlab机器人工具箱的使用和DH建模方法回顾
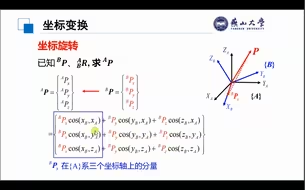
机器人学 l 2.2 坐标变换
【机器人理论最好中文入门课程 没有之一】 机械臂 系统 结构 旋转矩阵 变换矩阵 DH模型 运动学正逆解 轨迹规划 动力学 控制 遥控操作 教程
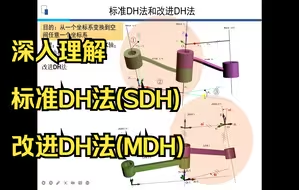
深入理解标准DH法(SDH)和改进DH法(MDH)
机器人学 1.23 用标准DH建模的一些例子 以及 逆运动学求解
机器人建模和控制
(10)标准DH参数详解+案例分析【1】|《动手学机器人学》