V
主页
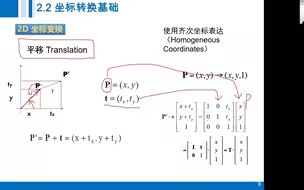
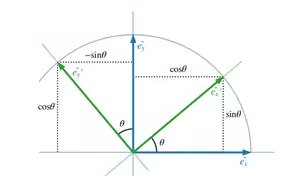
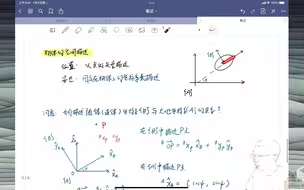
机器人学 l 2.2 坐标变换
发布人
-
打开封面
下载高清视频
观看高清视频
视频下载器
2.2 坐标转换基础
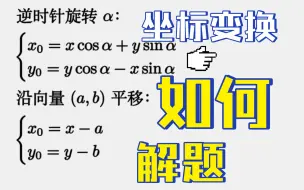
坐标变换:公式+例题解析
彻底搞懂在不同坐标变换坐标系下的三相锁相环输出特点
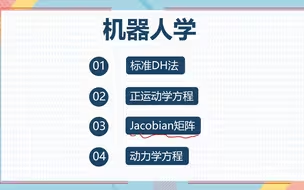
【机器人理论最好中文入门课程 没有之一】 机械臂 系统 结构 旋转矩阵 变换矩阵 DH模型 运动学正逆解 轨迹规划 动力学 控制 遥控操作 教程
彻底搞懂电力电子中的坐标变换
Simulink的abc to dq坐标变换以及如何自己搭建
你真的了解机器人坐标系吗
矩阵变换-三维坐标系
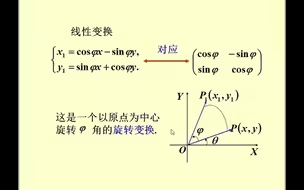
线性代数(24)坐标变换
【矩阵分析】二维旋转矩阵的推导(极坐标/基变换)
01-3 坐标转换矩阵
彻底搞懂电气工程中的坐标变换(ABC-αβ-dq变换)
快速掌握机器人运动学(4-10:数学基础之坐标及其变换)
3-5-3 过渡矩阵与坐标变换(仅数一)
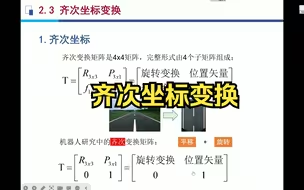
2-3齐次坐标变换
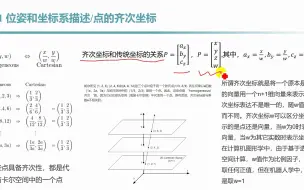
2.1 点的齐次坐标
机器人动力学拉格朗日法详细推导(二连杆机械臂)
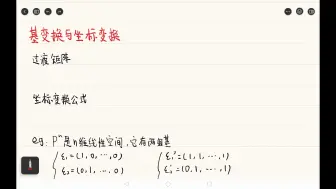
3.6基变换和坐标变换
机器人基础—坐标变换
1第一章-三相永磁同步电机-坐标变换
【机器人学】1-数学基础-1.2 空间位姿和齐次变换矩阵
机器人DH法、运动学、雅克比(Jacobian)矩阵
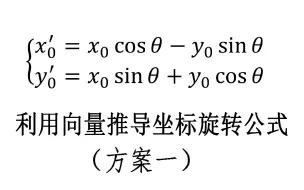
利用向量推导坐标旋转公式(方案一)
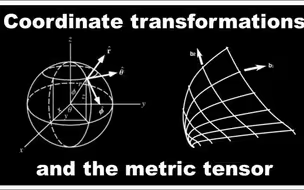
坐标变换与空间度量
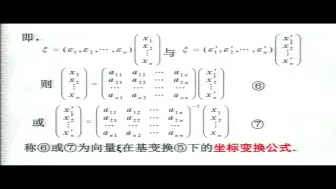
坐标变换公式
【弹塑性力学】2.2 坐标变换
【机械臂运动学教程】机械臂+旋转矩阵+变换矩阵+DH+逆解+轨迹规划+机器人+教程
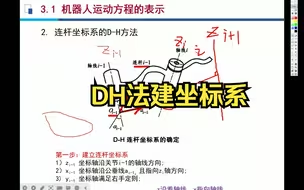
3-3DH法建坐标系
记录从零开始制作无人机(48)-无人机为什么要将机体坐标系变换成NED坐标系呢?
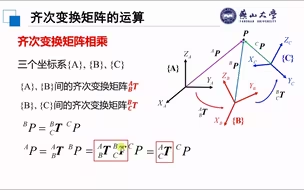
机器人学 | 2.3 齐次变换矩阵及其三重物理意义
机器人学 | 2.4 齐次变换矩阵的运算(矩阵相乘与矩阵求逆)
38.基变换与坐标变化
坐标系平移、旋转、缩放统一公式推导
Park/Clarke变换 (2)
【自动驾驶基础】坐标系变换
2.5物体的变换和变换方程
3.2-刚体运动坐标转换1
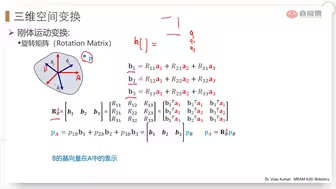
移动机器人-1.2-姿态与旋转矩阵
机器人学 1.1 左乘(pre-multiply)的意义
坐标变换(上)abc-αβ