V
主页
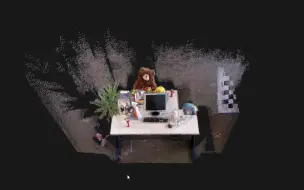
LVI_SAM(handheld.bag part 1)
发布人
LVI_SAM是一个紧耦合的雷达视觉惯导SLAM系统, 可以实时高精度鲁棒的进行状态估计和建图。 LVI_SAM结合了LIO-SAM和Vins-Mono的优势。官方数据集太大了 0.5倍速(效果最好)用了一小时给跑完了 后续一段一段传上来 。
打开封面
下载高清视频
观看高清视频
视频下载器
LVI_SAM(handheld.bag part 8)
LVI_SAM(handheld.bag part 4)
SLAM(orbslam2+yolov5+稠密建图)
ORBSLAM2稠密建图
gtsam
多传感器融合SLAM LIO_SAM
SLAM(记录学习)
ORB_SLAM2(稠密建图)
TANDEM
22年十佳开源SLAM算法
基于Gazebo的无人车激光SLAM建图与导航仿真
SLAM 室内建图 IMU(没固定好)+LIDAR+GPS(室内GPS信号弱)
lio_sam(公司旁边小区)
视觉SLAM进阶-从零开始手写VIO
A-LOAM和LeGo-LOAM的SLAM对比,使用Kitti数据集odometry的05序列
基于NVIDIA Isaac Sim和LIO-SAM的激光SLAM demo
TANDEM(纯视觉SLAM)
SLAM(orbslam2+yolo5+稠密建图)
ORBSLAM2+YOLOV5
MoveIt与Isaac Sim结合使用
港大ArcLab重磅开源LVI-GS:3DGS紧耦合LiDAR-视觉-惯性SLAM!实时照片级建图!
多相机视觉SLAM
浙大章国锋团队最新NIS-SLAM:突破神经隐式语义RGB-D SLAM的极限(上篇)
SLAM系统-上 北邮教授深入浅出三维视觉技术(全网质量最高)
视觉SLAM VIO开源代码解析
多旋翼无人机使用多相机SLAM同时定位
NeurlPS'24开源 | 迈向SLAM/SfM回环新纪元!MSG:关联场景中共视的地点和目标!
12步搭建智能机器人: 从设计到AI入门
【开源无人车】从零组装一辆开源PIX无人车
[IEEE TCSVT 2024]语义无关的动态SLAM
使用Isaac对Orin NX进行硬件在环测试(视觉SLAM)
【开源】宇树Unitree Go2四足机器人/机器狗Isaac Sim/Isaac Lab ROS2仿真平台
无人机SLAM入门教程(一):课程概述1.3 传感器简介
IEEE RAL空间机器人视觉导航/SLAM算法评估 Pyojin Kim发表首个舱内机器人外太空视觉-惯性数据集
要啥激光雷达,Factor Perception SDK夜间纯视觉SLAM演示
GPS+IMU+3D激光建图
【CGSAI】SLAM Zero to One
【SLAM-2024】第五届全国SLAM技术论坛-上海交通大学-卢策吾-具身智能的PIE模式研究
机器摄像:机器人工程师如何智能面试
使用Isaac Sim和ROS2控制机器狗指南