V
主页
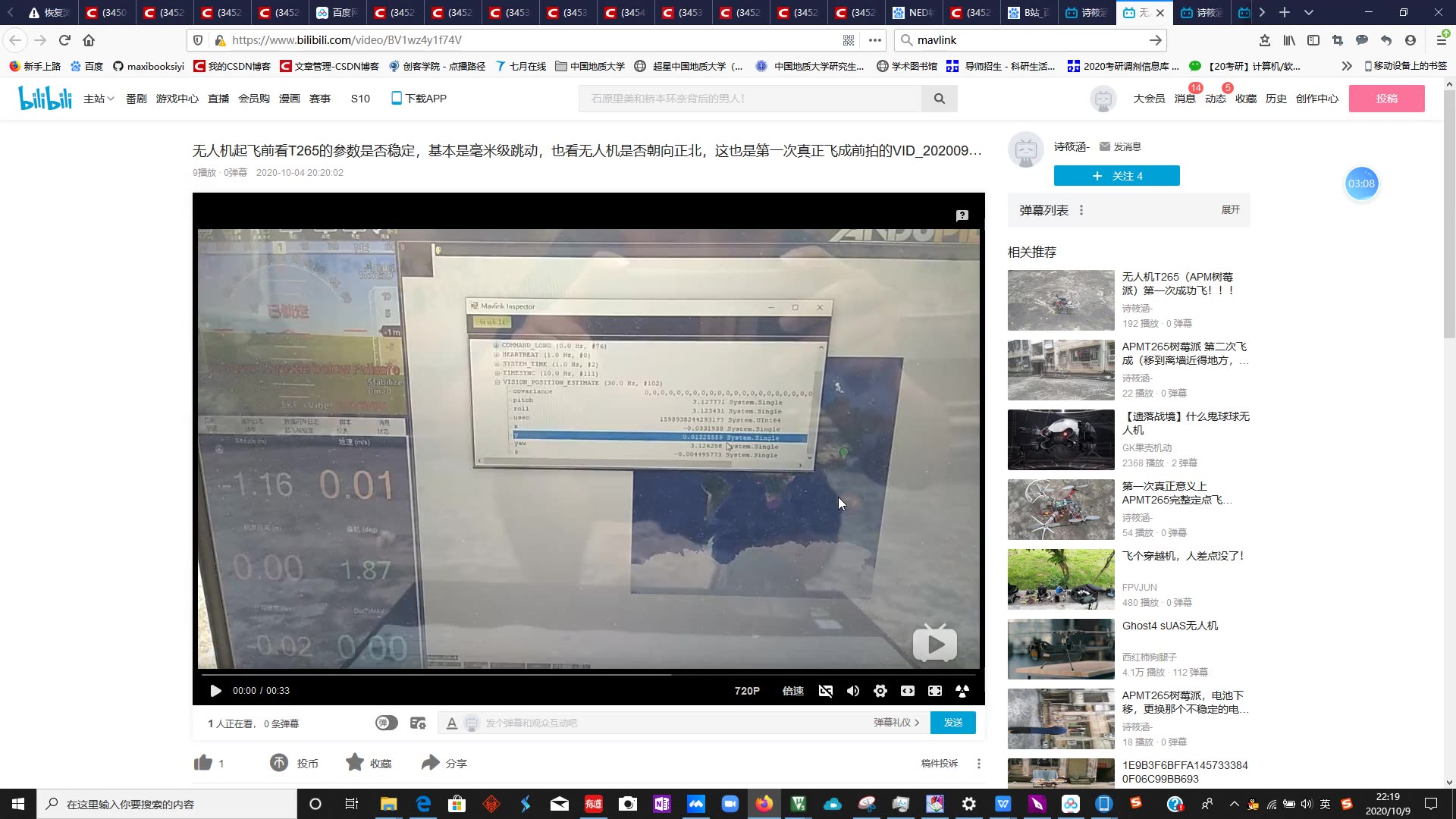
ACflymavlinkT265-20201009_221559
发布人
对ACfly进行传感器二次开发来接收我树莓派传来的T265的mavlink数据,对ACfly程序做的更改进行解读。
打开封面
下载高清视频
观看高清视频
视频下载器
基于T265或vins px4定点指点原理讲解与gazebo仿真演示20240329_122655
智能无人机课程 2 四旋翼无人机的组成和拼装 上
智能无人机课程 18 目标检测和跟踪
一次给他人的MAVROS讲解Screencast 2021-04-09 23_31_52
加了msg id判断之后传给传感器更新函数的T265的位置数据OK,ACfly可以正常接收并使用T265的位置数据VID_20201029_100801
智能无人机课程 7 常用传感器
智能无人机课程 1 无人机简介
T265+2D激光点云+octomap_server构建八叉树地图+astar路径规划过走廊 20220605_152950 截取视频
智能无人机课程 5 姿态表示与控制理论
智能无人机课程 14 多机协同控制
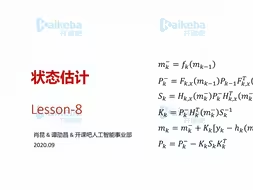
智能无人机课程 8 状态估计
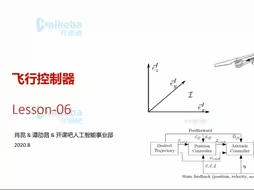
智能无人机课程 6 飞行控制器
基于T265和D435i octomap_server功能包实现octomap增量式建图 20220428_095553 截取视频 截取合并
智能无人机课程 16 运动规划
基于opencv的SGBM对D435i双目做立体匹配输出深度图演示与简单说明 20240326_211324
智能无人机课程 17 机器学习和图像处理
ubuntu18.04-win10双系统修改开启启动顺序(修改为默认选win10启动)VID_20201111_002250
智能无人机课程 3 四旋翼无人机的组成和拼装 下
智能无人机课程 4 工程训练:如何减震
在恢复备份镜像的树莓派上启动三个节点,将T265位置数据传递给ACfly,已初步实现跑通20201028_105846
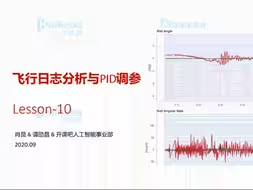
智能无人机课程 10 飞行日志分析与pid调参
aruco二维码检测定位原理讲解及基于opencv的代码和ros功能包实现 20240403_181351
大疆目前最强的变焦可达400倍,3公里外的路牌都能看得清
aruco二维码降落原理与代码讲解及gazebo仿真演示 20240422_094842
感受一下7万块的威力,行业无人机M30T
ACfly与树莓派T265初步跑通所拍摄视频VID_20201028_112201
智能无人机课程 12 ros gazebo
智能无人机课程 13 PX4仿真平台搭建
观看FASTLAB的一次飞行,挺稳的 20221027
智能无人机课程 9 试飞无人机
在笔记本Ubuntu上运行ManhattanSLAM(基于TUM数据集运行) 20220820_112233 截取视频
垂起固定翼通过mavros实现航点飞行gazebo仿真演示与代码讲解20240524_084947
ACfly的UART驱动程序代码讲解,基于freertos.20201026_233002 截取合并1
改前端为基于MLSD+光流进行结构线特征跟踪 前端line_feature跑20221016_2录的D435i包屏幕录像 2023-03-26 13:43:39
发期望姿态+推力实现无人机悬停和走轨迹 VID_20220327_173714
无人机T265(APM树莓派)第一次成功飞!!!
STlink驱动安装,keil设置,STlink程序烧录,重新上电运行20201027_185231
ACfly-T265第二次飞(纯T265)VID_20201107_151114
智能无人机课程 11 linux git python
跟他人学PX4的PID调参录屏 20210423_143805