V
主页
加了msg id判断之后传给传感器更新函数的T265的位置数据OK,ACfly可以正常接收并使用T265的位置数据VID_20201029_100801
发布人
加了msg id判断之后传给传感器更新函数的T265的位置数据OK了,ACfly可以正常接收并使用T265的位置数据,ACfly地面站看到的AClfy接收的T265的数据波形也正常了VID_20201029_100801
打开封面
下载高清视频
观看高清视频
视频下载器
不想让你知道的你打听也没用
对ACfly进行传感器二次开发来接收我树莓派传来的T265的mavlink数据ACfly-mavlink-T265-20201009_221559
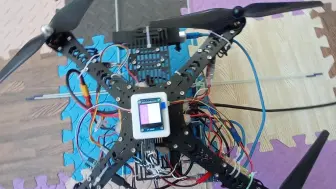
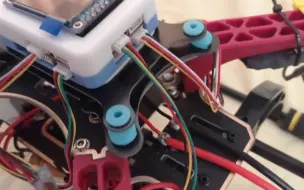
在恢复备份镜像的树莓派上启动三个节点,将T265位置数据传递给ACfly,已初步实现跑通20201028_105846
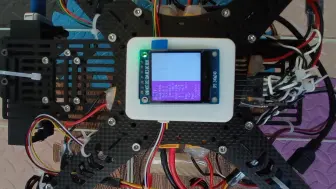
ACfly-树莓派-T265整个系统都跑通,坐标系确认正确,屏幕显示OK,准备下一步实飞VID_20201029_170608
2021弄T265与GPS融合 VID_20210829_100242
基于T265和D435i octomap_server功能包实现octomap增量式建图 20220428_095553 截取视频 截取合并
ACfly-T265的遥控器操作VID_20201110_234539
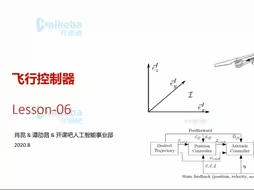
智能无人机课程 7 常用传感器
ACfly-T265第四次飞也是第一次打杆机动飞VID_20201108_121819
小车跑vinsgpu-ego VID_20221010_143409 截取视频
ACfly-T265炸机后拍VID_20201109_163647
无人机起飞前看T265的参数是否稳定,基本是毫米级跳动,也看无人机是否朝向正北,这也是第一次真正飞成前拍的VID_20200901_145226
ACfly与树莓派T265初步跑通所拍摄视频VID_20201028_112201
APM T265 树莓派,SSH启动树莓派三个节点视频演示,实现T265的位置信息传给APM
ACfly-T265第七次飞,拉上窗帘看定点效果VID_20201109_121755
ACfly-T265第一次飞(求稳同时装了TFmini)VID_20201107_125411
我的ACfly F330拆之前再拍一次(更高清)VID_20201027_142832
第一次真正意义上APMT265完整定点飞成!!!VID_20200901_145440
ACfly-T265第二次飞屏幕上的操作录屏20201107_145913
ACfly-T265第五次飞,打杆飞更大距离,停下后飘得更多些,撞墙炸机,室内小也是尴尬VID_20201108_174432
ACfly-T265第四次飞也是第一次机动打杆飞行屏幕上的操作录屏20201108_121315
这就是对地!-2024cuadc备赛
ACfly-T265第一次飞屏幕上的操作录屏20201107_124914
ACfly-T265第二次飞(纯T265)VID_20201107_151114
ACfly-T265第九次飞,人走到T265前面拍摄,后来不小心碰到油门炸机,挺可惜的VID_20201109_163141
确认了整个系统的坐标系是OK的,在T265默认朝北上电的情况下,确认传入传感器更新函数的数据符合ACfly的东北天坐标系VID_20201029_162226
基于T265或vins px4定点指点原理讲解与gazebo仿真演示20240329_122655
ACfly-T265第三次飞屏幕上的操作录屏(也是真的第一次完整成功飞)20201107_162805
ACfly-T265第六次飞,多次小步打杆飞到床上,吸取昨天一次性打杆飞比较长距离的教训,一次打杆飞一小段VID_20201109_095610
ACfly-T265第三次飞,纯T265,也是第一次真正完整飞成VID_20201107_163144
ACfly-T265第八次飞行,专门选了个光照好的时间进行专门的定点测试,看看定的如何VID_20201109_133659
VID_20200709_114756,b为默认的5.5,第一次飞ACfly
第一次飞ACfly-猛禽360 VID_20201103_121832
第二天给白地板铺上彩色海绵垫,ACfly-猛禽360定得还可以,b为默认5.5 VID_20201104_143046
把基于opencv4的vins-mono前端改为superpoint+光流 20230918_160125 截取视频
智能无人机课程 14 多机协同控制
玩具?最便宜的飞天神器!DJI NEO无人机【值不值得买第665期】
智能无人机课程 10 飞行日志分析与pid调参
智能无人机课程 16 运动规划
智能无人机课程 6 飞行控制器