V
主页
京东 11.11 红包
Lerobot项目介绍和实操效果
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
手写DiffusionPolicy【1】:最简单的机器人操作
【研三】自研多模态大模型架构——长时程、高鲁棒
Diffusion Policy 结合 PPO 模仿+强化 (下)
具身智能课程-pybullt仿真器学习第一课
【机器人科学III】让机器人拥有类人触觉感知,哥伦比亚大学机器人实验室最新进展
遥操作库Humanoid Arm Retarget详解(作者王文灏主讲)
具身智能常用AI工具-必看
30元教你学会用Issac gym训练宇树机器狗试听第一期
大模型在具身智能中的应用
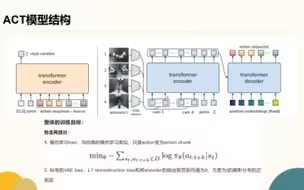
斯坦福ACT算法原理2-ACT模型
【REAL】中文字幕|UMI夹爪组装教程|UMI - Assembly Tutorial
全网最专业Figure 02视频讲解
具身智能机械臂实操入门课程-04(完):模型推理和抓取效果验证
具身智能课程-pybullt仿真器学习第二课
具身智能技术综述上
具身智能新思路———Diffusion Policy 结合 PPO 模仿+强化 (上)
30元教你学会用Issacgym训练宇树机器狗试听第二期
具身智能课程-pybullt仿真器学习第三课搭建自己的具身智能学习平台
【论文分享】GR-2和何恺明具身智能首作
具身智能领域最容易落地的方向-遥操作
【SLAM-2024】第五届全国SLAM技术论坛-上海交通大学-卢策吾-具身智能的PIE模式研究
【直播回放】具身智能系列之感知技术课程
Dobb·E 一个开源的家庭机器人操作臂端到端学习训练框架
【LeRobot】中文字幕|VQ-BeT:LeRobot Research Presentation 4 by Mahi & jay
0基础学习具身智能第一步,选择自己的仿真平台
具身智能综述下
0基础学习具身智能第一步,仿真数据使用
入门机器人Diffusion Policy
通用抓取 ----2D图像分割
使用Isaac Sim和ROS2控制机器狗指南
具身智能机械臂实操入门课程-03:机械臂的数据集录制与模型训练
AI奇点说 | 第九期:未来走进现实,机器人开始“上岗”你准备好了吗?
斯坦福ACT算法原理1-生成式模型(具身智能)
机器人和人类比赛煎牛排(Neo 1x)
番茄小说自撸项目实操
爱丁堡大学!雨雪无阻|毫米波成像雷达赋予具身智能鲁棒的空间感知
RDT-1B:解密全球最大的双臂机器人扩散大模型
人工肌肉驱动的人形机器人|2024【Clone】
具身智能-通用抓取综述(model base 3D视觉派)
全网首个灵巧手课程-灵巧手综述