V
主页
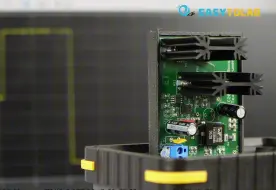
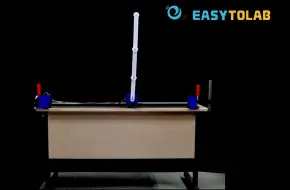
基于Matlab/Simulink实时控制的三自由塔式吊车实验平台
发布人
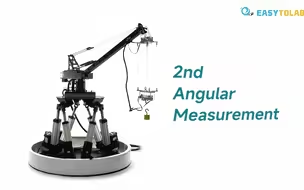
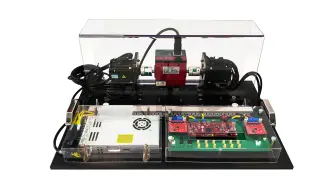
塔式吊车是一种具有复杂欠驱动特性的机电装备,广泛应用于现代建筑施工工地。它的动力学模型本质上是高度非线性的,驱动器远离有效载荷,使系统内机构运动不同步。由此导致负载摆动幅度大,定位精度不高,抗干扰能力差甚至增加安全隐患的问题。几十年来如何设计合适的控制器减少有效载荷的摆动以提高塔式起重机工作效率、精确定位和安全生产一直是国内外学者们重要的研究课题。 三自由塔式吊车实验平台是依据现代结构的塔式起重机设计的。三自由塔式吊车系统是一个高度非线性多入多出系统,配备了独特的2D角度测量传感器。该平台包括一个前臂和一个平衡臂,两个都是安装在一个在回转支撑轴承位置上的转盘上。平衡臂携带了一个平衡重物,前臂通过一个电动滑块挂载起重物。 Simulink/LabView软件系统可实现实时控制算法的快速原型验证。不需要编写C代码,及复杂的编译过程。三自由塔式吊车实验平台随基本控制器库一起提供。该模型由三个电动机控制系统和七个位置编码器测量系统组成。上位机系统实时显示了吊车位置和摆角。在MATLAB/Simulink从下拉菜单中选择的“实时工作”和“构建模型”项执行RTW例程。实验结果将通过可执行文件连接到Windows Target之后,获得了一个作为实时控制器运行的可执行文件。真正实现仿真即实验的目的。
打开封面
下载高清视频
观看高清视频
视频下载器
Magman平面磁力操控实验平台演示花絮
基于Matlab/Simulink实时控制的船吊实验平台 Ship-Mounted Crane
AquaROV水下机器人(Matlab/Simulink)
旋转二级倒立摆控制系统(Matlab/Simulink版本)
Drone Gimbal 无人机测试系统
虚拟同步发电机VSG(五)不平衡电网并网电网不平衡电流平衡控制MATLAB/Simulink仿真
基于Matlab/Simulink实时控制的永磁同步电机对拖加载实验平台
Multi-Agents 多智能体机器人实验平台
ET-Motor-Kit 桌面级多电机加载实验平台
地空异构多机器人协同控制系统(ET-UGADV-08)
积木moc吊车ac900重载专场
Pendubot 实验平台
【免费】这是之前我购买的一大堆代码,同学们,觉得有用吗?可以都送给你们!!!(链接在评论区置顶)
基于Matlab/Simulink的Buck和Boost电路实验平台
【274】多智能体系统 (Multi-Agent Systems, MASs)
【285】使用fmincon函数的模型预测控制MPC
大场面!纪录利勃海尔ltm1450-8.1起重机拆除钢梁
【009】多智能体系统 (Multi-Agent Systems, MASs)一致性编队
三级直线倒立摆实验平台
【046】MPC模型预测控制基础
直线三级倒立摆(Matlab/Simulink)
单相PWM整流器(二)PR控制比例谐振控制双闭环PFC功率因数校正单位功率因数MATLAB/Simulink仿真
4000吨吊车三一重工太强一天出场费用高达20万
【matlab&simulink手把手教学3.5】控制部分之分析控制框图的传递函数或绘制伯德图(Linear Analysis Tool)(simulink篇)
男子连人带车被吊车吊钩钩飞!旁边路灯被撞断!
【173.041】多智能体系统仿射编队机动控制
【MATLAB论文复现】研一研二必看!MATLAB论文如何从代码到公式完整复现?看完这个你就彻底懂了!草履虫都能学会!
【280】【合集】滑动模态控制(Sliding Mode Control, SMC)相关仿真实验
【284】切换拓扑下多智能体系统 (Multi-Agent Systems, MASs)一致性问题
高压直流输电HVDC(三)基于LCC和VSC的混合高压直流输电MATLAB/Simulink仿真
超起塔矿火炬塔安装!
记录中联300吨起重机拆除地铁45吨门吊
【270】动态不确定自主无人舰艇编队的自适应动态面控制
【271】基于学习的随机MPC自动驾驶故障检测与数据驱动的最优自适应容错控制
国之重器,你知道4000吨的吊车出场费一次多少钱吗?——徐工XCA4000
【matlab&simulink手把手教学5.5】控制部分之计数器模块(simulink篇)
LR11000
美女被邪术控制,变得乖巧听话
【292】【免费】静态事件触发、动态事件触发及其自触发的对比实验,以及复现时滞系统的解决方案
【matlab&simulink手把手教学3.6】控制部分之利用PID模块进行控制器参数整定(PID Tuner)(simulink)