V
主页
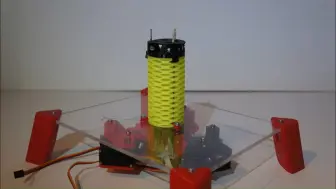
地空异构多机器人协同控制系统(ET-UGADV-08)
发布人
随着国家积极推进低空经济政策,我国的低空经济迎来了前所未有的发展机遇。作为支持低空经济发展的技术创新,我们的地空异构协同控制系统系统融合了无人机、四旋翼无人机、四足机器人、无人车及动作捕捉技术的智能协作系统,并结合先进的人工智能和自主飞行技术,实现了地面与空中的智能化协同控制。这一系统的研发与应用,将为低空经济的快速崛起提供强有力的技术支持和智能化解决方案。 我们的动捕系统采用高精度捕捉技术,能够实时监测目标的位置和姿态,并实时传输给无人车和四足机器人,以实现对指定路径的精准跟踪和导航。 无人车和四足机器人配备了先进的避障系统,能够根据环境中的障碍物自主调整路径,确保安全行驶。科研人员可以利用该系统进行不同复杂环境下的避障策略验证,探索更加高效的避障算法。其中小型四足机器人则以其强大的地形适应能力和多功能性,可广泛应用于监控、搜索救援等任务。无人车具备先进的避障系统和自适应性,能够在各种路况和环境中安全驾驶。 小型四旋翼无人机具备灵活的机动性和精准的姿态控制能力,可以在空中实现各种复杂动作和轨迹追踪任务。科研人员可以利用该系统进行姿态控制算法的研究和验证,以及轨迹追踪算法的性能评估。 此外,ET-UGADV-08系统还支持避障实验和编队飞行等功能,为教学和科研提供了更加丰富的实验场景和应用案例。研究人员可以通过该系统进行多智能体系统的协同控制研究,探索不同智能体之间的协同工作机制和优化策略。 无论是在科研领域还是实际应用中,ET-UGADV-08地空异构协同控制系统都将发挥重要作用,为智能控制领域带来新的突破和发展。
打开封面
下载高清视频
观看高清视频
视频下载器
Drone Gimbal 无人机测试系统
六自由度无人机测试系统 (Matlab/Simulink)
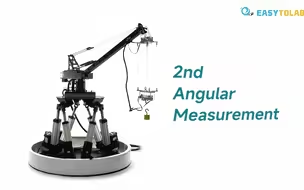
旋转二级倒立摆控制系统(Matlab/Simulink版本)
N100新能源实验平台
Multi-Agents 多智能体机器人实验平台
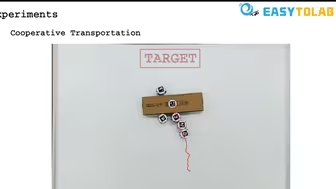
多智能体机器人协同搬运控制
ET-Motor-Kit 桌面级多电机加载实验平台
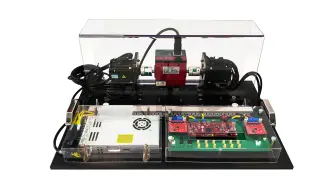
基于Matlab/Simulink实时控制的永磁同步电机对拖加载实验平台
基于Matlab/Simulink的Buck和Boost电路实验平台
AquaROV水下机器人(Matlab/Simulink)
地空异构控制系统花絮01
基于Matlab/Simulink实时控制的船吊实验平台 Ship-Mounted Crane
0603-副本
基于Matlab/Simulink实时控制的六自由度并联机器人Stewart
分享之前录的一个视频:用手柄控制四足机器人
多智能体一致性带输入饱和约束论文讲解
基于Matlab/Simulink实时控制的三自由塔式吊车实验平台
连续机器人轨迹跟踪
【173.041】多智能体系统仿射编队机动控制
【283】不确定性下安全临界多智能体系统连续控制的二次规划
【开源无人机】ROS系统中yolo模型处理多摄像头
CORL 2024,可微分仿真学习四足机器人运动
基于Matlab/Simulink实时控制的三自由度桥式起重机实验平台
Magman平面磁力操控实验平台演示花絮
【268】有向图上多智能体系统的自适应二部时变编队控制
【285】使用fmincon函数的模型预测控制MPC
215:顶刊复现:多智能体有限时间分布式事件触发一致性控制
欠驱动机器人在柔性电缆上的控制应用
【046】MPC模型预测控制基础
第二期:带你从零开始搭建一架四旋翼飞行器
第一篇全华班IEEE TRO best paper :分布式快速协同探索多无人机系统RACER
【109】基于强化学习算法的最优反馈控制
多智能体系统的分布式动态事件触发(固定拓扑和切换拓扑)共识控制
无人直升机编队系统 Unmanned helicopter formation system
[CL]ESP32四足机器人操作演示-适配立创开源平台对应项目
【009】多智能体系统 (Multi-Agent Systems, MASs)一致性编队
【270】动态不确定自主无人舰艇编队的自适应动态面控制
波士顿动力 Spot 足臂协同操作
【271】基于学习的随机MPC自动驾驶故障检测与数据驱动的最优自适应容错控制
四足机器人ROS PID控制原理讲解