V
主页
AquaROV水下机器人(Matlab/Simulink)
发布人
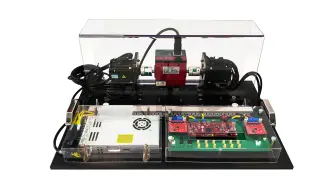
AquaROV水下机器人(Matlab/Simulink) AquaROV 是一款高性能水下科研机器人。无论是海洋学研究、环境监测,还是水下考古和工程检查,AquaROV 都是您的理想选择。 采用先进的模块化设计,AquaROV 可根据需求进行自定义配置和升级。高精度推进系统和智能控制软件,使其在各种水下环境中都能灵活操作,确保科研任务顺利完成。 AquaROV 拥有开放的硬件和软件平台,全面支持 ROS、Matlab/Simulink 和 LabVIEW,使您的科研操作和数据处理更加高效。ROS 提供强大的机器人控制和数据处理功能,Matlab/Simulink 适用于建模、仿真和数据分析,而 LabVIEW 则提供便捷的图形化编程环境。其用户友好设计和强大功能,成为许多科研工作者和机构的首选设备。加入 AquaROV 的全球科研用户群体,让我们一起探索深海的奥秘,推动科学研究的进步。
打开封面
下载高清视频
观看高清视频
视频下载器
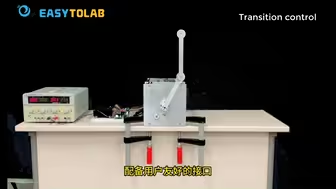
基于Matlab/Simulink实时控制的船吊实验平台 Ship-Mounted Crane
AquaROV Assembly
AquaROV 声纳系统
基于Matlab/Simulink实时控制的六自由度并联机器人Stewart
六自由度无人机测试系统 (Matlab/Simulink)
Drone Gimbal 无人机测试系统
旋转二级倒立摆控制系统(Matlab/Simulink版本)
地空异构多机器人协同控制系统(ET-UGADV-08)
基于Matlab/Simulink实时控制的三自由度桥式起重机实验平台
地空异构控制系统花絮01
直线三级倒立摆(Matlab/Simulink)
多智能体机器人协同搬运控制
欠驱动机器人在柔性电缆上的控制应用
基于Matlab/Simulink实时控制的永磁同步电机对拖加载实验平台
二自由度直升机实验平台
基于Matlab/Simulink的Buck和Boost电路实验平台
基于Matlab/Simulink实时控制的三自由塔式吊车实验平台
Magman平面磁力操控实验平台演示花絮
ET-Motor-Kit 桌面级多电机加载实验平台
Multi-Agents 多智能体机器人实验平台
双机械臂实时控制系统实验平台
2-DOF(双自由度)排斥磁悬浮系统
无人直升机编队系统 Unmanned helicopter formation system
Pendubot 实验平台
三级直线倒立摆实验平台
Magman平面磁力操控实验平台
肌肉记忆,会让人在台阶上绊倒!
看的片是假的?野生性教育竟然骗了我们这么多年?
学会这几个打结技巧,那你就是最靓的仔
核保密终结!地下核试验探测准确率99%,【科学快报178】
“压电效应”是什么?用锤子猛击口哨糖,不可思议的现象发生了
耗时60天花费2万元!我做出了全网最还原的基德魔术牌!
推理破解,2年未解的难题。难度4星
【8K】耗时两年,二十多万张照片,两千多小时的拍摄,全B站最全星云,星系,彗星,星空,银河,极光,微距,风光延时摄影视频
设计得很牛的眼睛,是怎么死掉的?
脚踩面包哗众取宠?莫为流量不懂装懂!
科学分析:打游戏菜不是我的问题
鸽子开导弹/植物长眼睛/死鱼能游泳/直肠会呼吸/2024搞笑诺奖大盘点!
塔克拉玛干到底有多干(终极版)?
劳动人民的智慧!利用能量转换搬运轮胎。 #科普 #解压 #物理 #势能 #冷知识