V
主页
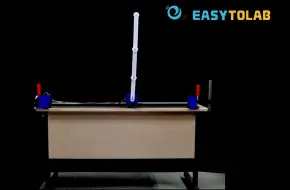
Drone Gimbal 无人机测试系统
发布人
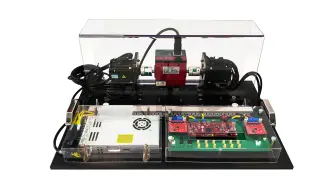
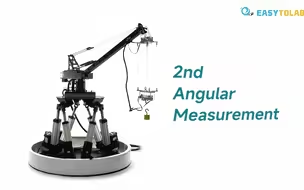
普通无人机测试中在空中飞行时可能与其他航空器或物体发生碰撞,导致飞机失控、坠毁,甚至引发空中事故。而Drone Gimbal Rig 2采用灵活的运行模式可以安全适应不同的测试需求:手动模式允许用户直接控制测试过程,进行定制化的飞行测试;自动模式通过预设的测试方案自动运行,适用于标准化测试流程;模拟模式模拟外部环境影响,评估无人机在特定条件下的表现。其硬件部分包括高精度磁编码器和滑环机构,提供精确的飞行动态数据和无限制的旋转自由度。用户可以通过MATLAB/Simulink、ROS和LabVIEW进行调控。 该平台通过提高测试效率、降低研发成本、增强安全性和促进技术创新,Drone Gimbal Rig 2将助力无人机行业向着更加安全、高效和创新的方向迈进。
打开封面
下载高清视频
观看高清视频
视频下载器
六自由度无人机测试系统 (Matlab/Simulink)
地空异构多机器人协同控制系统(ET-UGADV-08)
AquaROV水下机器人(Matlab/Simulink)
无人机水果采摘系统
基于Matlab/Simulink实时控制的永磁同步电机对拖加载实验平台
基于Matlab/Simulink实时控制的船吊实验平台 Ship-Mounted Crane
旋转二级倒立摆控制系统(Matlab/Simulink版本)
【开源无人机】从零调试一架开源无人机M0-F250
7.2无人机PID参数调试
基于Matlab/Simulink实时控制的六自由度并联机器人Stewart
【开源无人机】ROS系统中yolo模型处理多摄像头
Magman平面磁力操控实验平台演示花絮
【开源无人机】ROS无人机编队代码讲解
【046】MPC模型预测控制基础
N100新能源实验平台
【009】多智能体系统 (Multi-Agent Systems, MASs)一致性编队
ET-Motor-Kit 桌面级多电机加载实验平台
无人机水果采摘
【免费】这是之前我购买的一大堆代码,同学们,觉得有用吗?可以都送给你们!!!(链接在评论区置顶)
【开源无人机】S2无人机桥梁巡检
AquaROV 声纳系统
【294】多智能体系统 (Multi-Agent Systems, MASs)分布式事件触发控制
Isaac Sim和ROS2自主移动机器人(bcr_bot)
【284】切换拓扑下多智能体系统 (Multi-Agent Systems, MASs)一致性问题
【267】基于观测器的单侧Lipschitz非线性系统时变队形自适应跟踪
直线三级倒立摆(Matlab/Simulink)
无人直升机编队系统 Unmanned helicopter formation system
【开源无人机】室内款低成本无人机M0-F250介绍及代码讲解(源码资源链接在简介)
基于Matlab/Simulink实时控制的三自由塔式吊车实验平台
2-DOF(双自由度)排斥磁悬浮系统
【开源无人机】无人机各飞行模式讲解
欠驱动机器人在柔性电缆上的控制应用
【292】【免费】静态事件触发、动态事件触发及其自触发的对比实验,以及复现时滞系统的解决方案
【开源无人车】从零组装一辆开源PIX无人车
【173.041】多智能体系统仿射编队机动控制
【291】事件触发机制下的多智能体系统 (Multi-Agent Systems, MASs) 平均一致性分布式控制问题
使用Isaac对Orin NX进行硬件在环测试(视觉SLAM)
【开源无人船】从零组装一艘测绘无人船
使用Isaac Sim和ROS2实现大田农业机器人
自驾车ROS实践 - Self Driving and ROS – Learn by Doing! Odometry & Control