V
主页
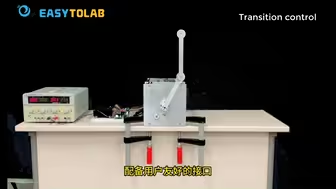
基于Matlab/Simulink实时控制的船吊实验平台 Ship-Mounted Crane
发布人
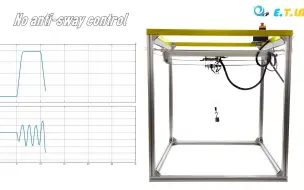
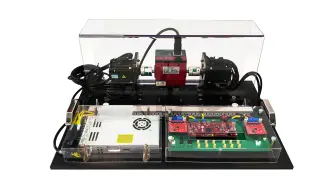
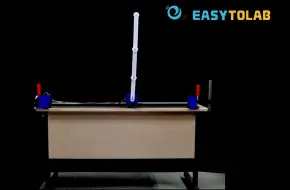
船用吊车一般指负载吊运过程位于海面之上,主要用于舰船间货物的运输转移等。与陆地吊车等类似,海上吊车在运输过程中,需要解决由于意外碰撞等引起的负载摆动的抑制问题。此外,由于吊车安装于船体之上,而船体本身受到海浪、海流的影响会产生多个自由度的平动与转动,进而严重影响负载的运输与定位,因此,在控制过程中必须对船身的运动进行有效补偿。船体运动导致的负载扰动通常远大于意外碰撞的影响,且导致整个系统工作在非惯性系,给控制方法设计及分析带来了巨大挑战。 船吊控制系统平台由主吊车系统和Stewart六自由度风浪模拟器两部分组成。吊车系统都安装在转盘上,回转轴承和回转机械位于该转盘上。副臂带有配重,副臂悬吊了推车上的货物。该系统与MATLAB / Simulink完全集成,并且可以实时运行。包括许多预编程的控制实验。它们构成了构建用户自己的新算法的适当基础。实时控制算法的快速原型设计变得很容易(不需要编写C代码)。有三个控制驱动器(配有齿轮的直流电动机)和五个角位置传感器(编码器)。副臂在第一个强大的驱动器的驱动下旋转。副臂导轨上的手推车具有可调的间隙,并通过传动带和第二个驱动器来回推动。提升负载由第三驱动器操作。典型的控制目标是跟踪所需的三维轨迹(即以规定的方式操作负载),并同时将负载保持在最小的摆动幅度上。
打开封面
下载高清视频
观看高清视频
视频下载器
基于Matlab/Simulink实时控制的三自由塔式吊车实验平台
基于Matlab/Simulink实时控制的六自由度并联机器人Stewart
基于Matlab/Simulink实时控制的三自由度桥式起重机实验平台
基于Matlab/Simulink实时控制的永磁同步电机对拖加载实验平台
AquaROV水下机器人(Matlab/Simulink)
Drone Gimbal 无人机测试系统
六自由度无人机测试系统 (Matlab/Simulink)
旋转二级倒立摆控制系统(Matlab/Simulink版本)
直线三级倒立摆(Matlab/Simulink)
基于Matlab/Simulink的Buck和Boost电路实验平台
双机械臂实时控制系统实验平台
Magman平面磁力操控实验平台演示花絮
N100新能源实验平台
地空异构多机器人协同控制系统(ET-UGADV-08)
地空异构控制系统花絮01
ET-Motor-Kit 桌面级多电机加载实验平台
Pendubot 实验平台
Multi-Agents 多智能体机器人实验平台
电机对拖平台Simulink直连控制与代码生成的本质区别
Magman平面磁力操控实验平台
手写FOC磁场定向控制Simulink源码分享
三级直线倒立摆实验平台
AquaROV 声纳系统
有刷电机Simulink直连控制-二阶多智能体位置跟踪
AquaROV Assembly
2-DOF(双自由度)排斥磁悬浮系统
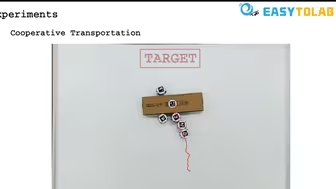
多智能体机器人协同搬运控制
欠驱动机器人在柔性电缆上的控制应用
连续机器人轨迹跟踪
无人直升机编队系统 Unmanned helicopter formation system
看的片是假的?野生性教育竟然骗了我们这么多年?
抬头望向星空,看它们如何为你闪耀
医学生眼中:情绪稳定是可以吃出来的
肾俞穴。浅扎一下。
核保密终结!地下核试验探测准确率99%,【科学快报178】
震惊! 美国名校物理学教师因薪水太低,无家可归,怒斥系领导!《千万不要做科学家》复活!
少年,你对中微子一无所知!中微子到底有何诡异之处?
痒痒抓抓 抓抓更痒 湿疹究竟怎么才能好?!
【你以为的二战俯冲轰炸 VS 现实中的二战俯冲轰炸】螺旋桨飞机是如何进行俯冲投弹的。
【十大产业】中国装备制造业:不要停下,直到怒火击穿痛苦,直到泪水流入心脏