V
主页
京东 11.11 红包
密歇根大学开源”本体感觉不变的机器人状态估计”
发布人
本文提出了一种实时不变的本体感知机器人状态估计框架DRIFT。为了使这种尖端的保对称方法能够用于更广泛的机器人应用,提供了对不变Kalman滤波的教学介绍。此外,这项工作深入开发了一种用于航位推算的本体感知状态估计框架,该框架仅消耗来自机载惯性测量单元和机器人运动学的数据,具有两个可选模块,即用于低成本机器人的接触估计器和陀螺滤波器,使其能够在缺乏感知数据的情况下在各种机器人平台上跟踪机器人在长轨迹上的状态。使用足式机器人、室内轮式机器人、野外机器人和全尺寸车辆进行了广泛的真实实验,并提供了与海洋机器人的仿真结果,以了解DRIFT的局限性。 文章名称:【Proprioceptive Invariant Robot State Estimation】 文章链接:http://arxiv.org/abs/2311.04320 开源代码:https://github.com/UMich-CURLY/drift 项目网页:https://umich-curly.github.io/DRIFT_Website/
打开封面
下载高清视频
观看高清视频
视频下载器
MIT等开源|实时构建3D场景图,机器人探索大规模环境的空间感知算法!
ETH发布!轮腿式机器人的鲁棒自主导航与运动学习
加大洛杉矶分校与浙大等联合开源”物理高斯:用于生成动力学的物理集成三维高斯”
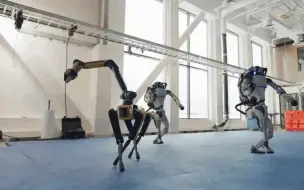
波士顿动力机器人,要成精了!
仅需3张图像即可合成逼真新视图,学习NeRF并优化相机姿态!ETHZ&Google等开源,CVPR2023
清华等联合开源!动态 3D 高斯超高保真头部重建
350km+的记录,cm级精度的数据集!用于自动驾驶的视觉长期定位!TUM开源!
听劝!【张雪峰】人工智能AI学习压力非常大!你能承受的了吗?!骂醒一个是一个!!!零基础入门人工智能/机器学习入门
【直播回放】武汉大学开源SLAM详解!低成本轮式机器人定位算法 Wheel-INS
有效处理遮挡、反光等问题,接近实时的三维重建!英伟达即将开源,CVPR2023!
西湖大学&浙大新开源|BAD-NeRF的捆绑调整技术,实现去模糊和恢复摄像机运动轨迹!CVPR2023
哈工大博士分享:基于Gaussian Splatting的SLAM新发展与新论文(上)
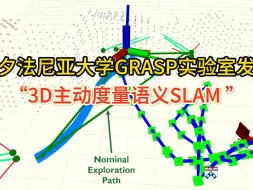
宾夕法尼亚大学GRASP发布:3D主动度量语义SLAM
哈工大发布|首个基于线特征的红外惯性里程计ETIO,性能超过了最先进的TIO!
双目VIO+点线特征+抗动态光照! 南洋理工最新开源!
机器人【孤勇者】“总有一天,全宇宙的机器人都要高看我”
都给我开源吧,工创赛智能救援赛道
牛津大学丨用于机器人安全导航的控制器丨[RA-L]
UCL博士分享:神经隐式表征在SLAM中的应用(附PPT!)
stm32+uno 大二毕设机械手 你想要一只真正的机械手吗?少年 肌电信号检测 舵机驱动
【神经网络杀疯了!】登上nature!人工智能迎来新突破!被证明具有泛化能力,能像人类一样思考
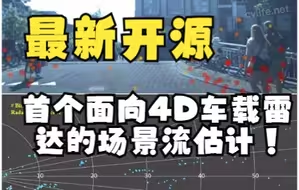
IROS2022|首个面向4D车载雷达的场景流估计,最新开源!
效率提高24%,突破功率受限!机器人的室内高效三维探索!宾夕法尼亚大学最新发布
IROS2022|腿式机器人+无人机强强联合,共同探索未知世界!苏黎世联邦理工研发
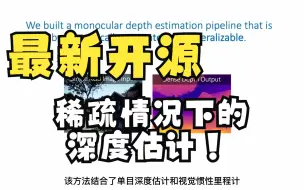
英特尔最新开源|50%以上的降低,适用于稀疏情况下的深度估计!ICRA2023
21个令人惊艳的创业机器人公司!
IROS22|动态环境下,资源受限机器人的惯性里程计!哈工大最新开源!
CVPR2022|德国宇航中心最新开源!高效率三维目标跟踪
苏黎世大学发布!无需状态估计的视觉像素敏捷飞行
一个网站就能找到任何你想要的机器学习和深度学习数据集!建议每一个人都好好收藏!!
《西部世界》重现!机器人复刻人类肌肉骨骼,惊悚科幻震惊网友
一个神级代码复现网站,里面99%的论文都能找到!
华科大最新工作分享:基于激光雷达-惯导-轮速计的联合状态估计!
哈工大博士分享:基于NeRF的SLAM技术发展与代表性开源算法介绍(上)
机器人能从猫猫身上学到什么?
2021年度盘点:十大最佳开源SLAM算法!
1.2 如何快速学习开源代码?
真强!无需再训练,直接输入即可生成真实的LiDAR点云感知读数!UIUC最新开源,ECCV2022!
浙大&Google最新发布|RGB图像引导下的基于轻量ToF传感器的深度估计!ECCV2022!
无GPS下,即可在杂乱的森林环境中自主飞行!宾大开源!