V
主页
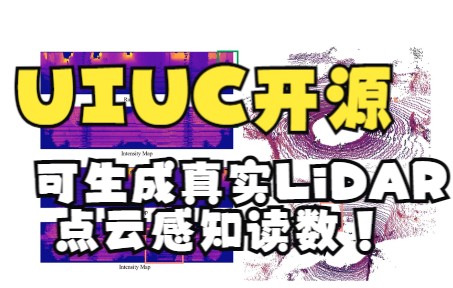
真强!无需再训练,直接输入即可生成真实的LiDAR点云感知读数!UIUC最新开源,ECCV2022!
发布人
https://www.youtube.com/watch?v=ZwrExPsa2Ws 他们介绍了LiDARGen,这是一种新颖、有效和可控的生成模型,可生成真实的LiDAR点云感知读数。我们的方法利用了强大的基于分数匹配能量的模型,并将点云生成过程描述为等矩形视图中的随机去噪过程。该模型允许我们在保证物理可行性和可控性的情况下,对不同的高质量点云样本进行采样。我们在具有挑战性的KITTI-360和NuScenes数据集上验证了我们的方法的有效性。定量和定性结果表明,我们的方法比其他生成模型产生更真实的样本。此外,LiDARGen可以根据输入对点云进行采样,而无需再训练。我们证明,我们提出的生成模型可以直接用于加密激光雷达点云。 项目主页:https://www.zyrianov.org/lidargen/ 代码地址:https://github.com/vzyrianov/lidargen 论文地址:https://arxiv.org/abs/2209.03954
打开封面
下载高清视频
观看高清视频
视频下载器
ECCV2022|任意两帧之间均可插入,可实现27倍视频加速处理!旷视等最新开源
成本降低2倍,用于提高视觉变换器的自适应令牌采样!微软等最新开源,ECCV2022!
首个具有详细标签的大规模数据集!比现有方法高出6.35%mloU! UZH新开源无需标记事件,即可进行语义分割!ECCV 2022
1.2 如何快速学习开源代码?
谷歌机器人子公司Intrinsic最新开源机器人抓取,无需收集数据或人工标注! ICRA 2022
法国团队最新开源!3D高斯溅射可以生成三维网格啦!
CMU & ICRA 2022 SLAM竞赛介绍及交流 “UGV大场景3D点云定位”和“UAV俯瞰视觉定位”
基于ros2-humble的lio-sam的建图自动导航仿真
SIGGRAPH 2022|在线画家来了!输入文字即可快速生成艺术画,效果惊艳!
复杂环境下,基于Lidar的无人机自主飞行!港大最新发布!
太酷了!手持激光雷达,即可在线实时重建点云!牛津大学最新发布,可用于森林调查!
多地图的作用和效果_7.2
ROS2用slam_toolbox建图,树莓派猪脑过载
SLAM知识星球直播答疑及抽奖
【最新开源】照片修复大师上线了,一键即可修复受损图片!南洋理工大学新研究,CVPR2022
上海交通大学博士分享基于神经隐式表征的语义SLAM(下)
第01讲 RTKLIB简介、安装、运行、调试(部分)
收藏不亏!4个地方,可获得开放的激光雷达数据!
武大最新开源:GNSS/INS组合导航开源代码KF-GINS详解
IMU选型、标定误差分析、AHRS组合导航
AR可以自动编故事了?输入故事即可转换为图形画面!GMU等发布,SIGGRAPH 2022!
武汉大学博士生分享算法面向室内SLAM场景的点云超分辨率算法(上)
瑞典皇家理工博士分享开源算法: 点云地图动态障碍物去除基准
牛津大学|这个IMU+四个相机的视觉惯性里程计真不错!漂移率降低80%、相对位姿误差降低39%!
【直播回放】SLAM学习入门经验分享
【最新开源】人脸编辑玩出不同花样!可改动年龄、操控表情等,太真实了!华南理工等新发布,ECCV2022
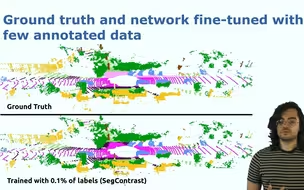
波恩大学最新开源代码!自动驾驶场景自监督三维点云表征学习,无需标注,RAL/ICRA 2022!
波士顿动力机器人,要成精了!
【直播回放】用于3D激光雷达SLAM闭环检测的词袋模型 BoW3D
即将开源!UCSD最新研究CoordGAN:人脸变雕像和油画,汽车颜色随便调 | CVPR2022
【直播回放】学习大礼包
浙大章国峰团队发布CP-SLAM: 协同基于神经点的SLAM
经验分享:我的SLAM学习之路-答疑交流
TRLO: An Efficient LiDAR Odometry with 3D Dynamic Object Tracking and Removal
ICRA2022|最小化成本,无特征环境下仍能估计轨迹!全局一致和紧耦合的3D激光惯性建图!
【SLAM前沿讲座】智利大学|用随机有限集统一SLAM的前后端
ICRA2022|用于深度和高分辨率事件相机的实时视觉里程计框架
仅需一张图片和音频,一键即可控制说话风格!清华最新发布,AAAI2023!
ICRA22大牛直播回放 | 无人车可信鲁棒几何感知
MIT等开源|实时构建3D场景图,机器人探索大规模环境的空间感知算法!