V
主页
IROS2022|首个面向4D车载雷达的场景流估计,最新开源!
发布人
同名公众号后台回复2210即可获取代码和论文地址!!! 近日,爱丁堡大学最新开源了一项工作,主要用于4D车载雷达点云的场景流估计。目前已被RA-L以及IROS2022录用。这是第一个研究 4D radar 场景流估计的工作。
打开封面
下载高清视频
观看高清视频
视频下载器
华科、华为联合开源!实时动态场景4D高斯泼溅,最高 82fps!
ECCV2022|任意两帧之间均可插入,可实现27倍视频加速处理!旷视等最新开源
华科大最新工作分享:基于激光雷达-惯导-轮速计的联合状态估计!
IMU选型、标定误差分析、AHRS组合导航
最新开源|支持惯性、激光雷达、双目和RGB-D传感器的系统!
武汉大学博士生分享算法面向室内SLAM场景的点云超分辨率算法(上)
100+小时,45000m²的覆盖面积!首个用于AR的定位和建图基准!ETHZ等新开源,ECCV2022!
武大最新开源:GNSS/INS组合导航开源代码KF-GINS详解
好神奇,一键即可变笑脸!面部、眼睛、嘴和头发均可任意改变!最新开源!
如何搞定真实数据?匹配的合成数据+跨模式表征学习即可!EPFL新开源,CVPR2022
强推!2024医学生必看的【人工智能+医疗】全套教程,教程从零开始,导师不教你的知识本课程统统告诉你,讲的非常全面!-人工智能/医学/计算机技术/计算机视觉
[搬运]2024全新《回到未来》主题项目!意大利Movieland电影乐园-《回到未来后传:来自未来的孩子们》全程
吹爆这个嵌入式项目实战!【基于人脸的考勤系统识别】这可能是B站最容易上手的嵌入式项目了吧!Arm+Qt+opencv!(人工智能、深度学习、神经网络、AI)
无需额外数据,输入文本即可合成高清一致的图像!首尔大学,即将开源!
清华深研院、哈工深发布!Lidar视觉紧耦合实时相对定位
无GPS下,即可在杂乱的森林环境中自主飞行!宾大开源!
波士顿动力机器人,要成精了!
太厉害了 已跪!终于有人能把OpenCV图像处理讲的这么通俗易懂了,现在计算机视觉opencv全套分享给大家。
CMU & ICRA 2022 SLAM竞赛介绍及交流 “UGV大场景3D点云定位”和“UAV俯瞰视觉定位”
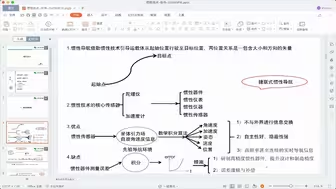
1.2 如何快速学习开源代码?
MIT发布|无需lidar和IMU之间的相对定位,即可提供高速率的里程计估计!
【直播回放】让机械臂自己学会6自由度抓取操控,代码已开源!
【直播回放】SLAM常见面试问题浅析
ICRA2022|最小化成本,无特征环境下仍能估计轨迹!全局一致和紧耦合的3D激光惯性建图!
港中大最新开源|2D秒变3D,基于2D场景风格化的光线配准!CVPR2023
强!秒变高清,视频纹理去除!港大等新开源,CVPR2022
手把手带你入门SLAM
闭环及地图合并流程_8.2
开源AI项目爆火!大叔秒变少女,GitHub狂揽7.9K星 | 零度解说
其实机器学习数学不难学,只需要打好这两门基础基础学起来简直轻轻松松!-人工智能/机器学习/机器学习数学/微积分/线性代数
无人机捉无人机!上演无人机界的老鹰捉小鸡!
牛津大学发布!可扩展激光雷达NeRF SLAM,时间节省一半!
智能模数转换器:让雷达屏幕上播放动画片的梦想更进一步
华科、杭电与华为联合开源!实时动态场景渲染的4D高斯溅射
AI作画来了!具有专家去噪器的文本到图像扩散模型!英伟达最新发布
手把手教你学习标定基础知识
一键即可改变,3D人脸实时编辑!清华&腾讯最新开源!
真的狗啊!当狗遇到机器狗!
苏黎世大学发布!无需状态估计的视觉像素敏捷飞行
【yolov8】一小时掌握!从0开始搭建部署YOLOv8,环境安装+推理+自定义数据集搭建与训练,入门到精通!