V
主页
京东 11.11 红包
【ICRA2021】双足运动控制接触点角动量的一步超前预测:在受 LIP 启发的控制器中的验证
发布人
最终,反馈控制是关于使用当前状态信息进行调整,以满足未来的目标。在双足运动控制中,质心的线速度已被广泛认为是制定反馈控制目标的主要变量。在本文中,我们认为预测接触点的角动量提前一步演化比对线速度进行类似预测更容易,因此它为反馈控制提供了优越的量。为了不将预测角动量的好处与任何其他控制设计决策混淆,我们根据角动量重新制定标准 LIP 模型,并展示如何在当前步骤结束时调节摆动脚触地位置以满足角动量目标在下一步结束。我们在 20 自由度双足机器人 Cassie Blue 上实现了生成的反馈控制器,其中
打开封面
下载高清视频
观看高清视频
视频下载器
【ICRA2021】移动机器人 3D 三角形网格上的连续最短路径矢量场导航
【ICRA2021】鲁棒模型预测路径积分控制:分析和性能保证
【ICRA2021】使用快速可见树的实时机器人路径规划
【动漫MC】魔法少女战败被敌人黑化控制
【ICRA2021】3602-移动机器人导航的终身学习方法
【ICRA2021】3475-OV2SLAM:用于实时应用的完全在线和通用的视觉SLAM
【小时-max】KZ0096 魔女灵气控制
【ICRA2021】3988-大尺度环境严重里程计漂移下自主体积探测的统一方法
【影视催眠】女主被反派控制成傀儡
附身8
【ICRA2021】用于自动驾驶汽车的基于 SRIF 的鲁棒 LiDAR-IMU 定位
【ICRA2021】基于虚拟磁场的实时路径规划
【ICRA2021】面向阿克曼转向车辆的基于在线 RRT 的路径规划算法
【ICRA2021】PHASER:一种无需对应的鲁棒全局点云配准
【ICRA2021】iCalib: 惯性辅助多传感器校准
【ICRA2021】动态切换人类预测模型以实现高效规划
萝莉被爷爷变成皮入替
【ICRA2021】直接稀疏双目视觉-惯性全局里程计
机器人自助定位导航之路的探索
控制黑化…
【ICRA2021】MDANet:用于深度完成的多模式深度聚合网络
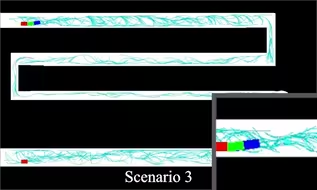
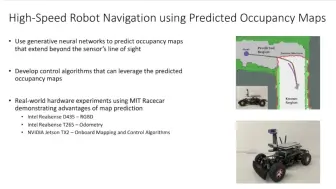
【ICRA2021】基于预测占有地图的高速机器人导航
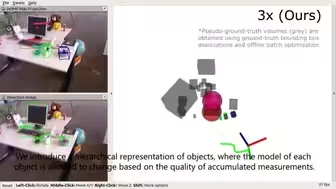
【ICRA2021】高效鲁棒导航的分层目标地图估计
【ICRA2021】3756-远程类车车辆的触觉引导路径生成
【ICRA2021】LIRO:紧耦合激光雷达惯性里程计
【ICRA2021】从模拟中学习,在现实中赛车
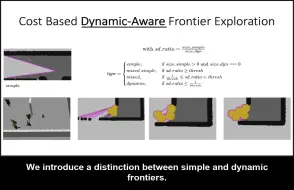
【ICRA2021】人口密集环境中的动态感知自主探索
美女被催眠洗脑控制,变得乖巧听话,唯命是从
【ICRA2021】有数据驱动补丁先验的 MCMC 占用栅格建图
【ICRA2021】视觉惯性里程计的等变滤波器
【小时-max】催眠控制001
初音未来被附身控制
【ICRA2021】利用多准则决策探索大型户外环境
【ICRA2021】基于平面几何的单目视觉里程计准确鲁棒的尺度恢复
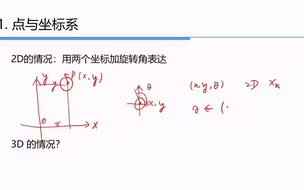
2-1 点与坐标系
【ICRA2021】FG-Conv:大型 LiDAR 点云理解利用特征关联挖掘和几何感知建模
【ICRA2021】鲁棒单目视觉惯性深度的嵌入式系统的实现
【ICRA2021】3809-基于优化的视觉惯性SLAM与原始GNSS测量紧密耦合
男穿皮变女后爱上雇主
【ICRA2021】基于图的大规模三维环境拓扑勘探规划