V
主页
京东 11.11 红包
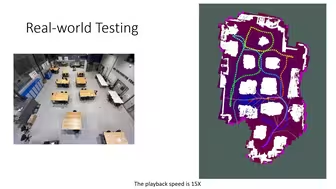
【ICRA2021】基于预测占有地图的高速机器人导航
发布人
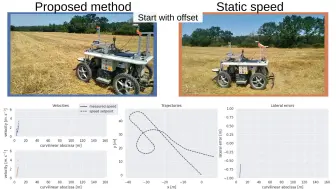
安全、高速的导航是机器人系统在现实世界中部署的关键能力。现有方法的一个重要限制是与显式映射相关的计算瓶颈和现有传感器技术的有限视野(FOV)。在本文中,我们研究了允许机器人预测超出传感器视界的空间的算法方法,以便在高速下进行稳健规划。我们使用从真实世界数据中训练的生成性神经网络来实现这一点,而不需要人工标注标签。此外,我们还扩展了现有的控制算法,以支持利用预测空间改进高速无碰撞规划和导航。我们的实验是在一个基于麻省理工学院赛车的物理机器人上进行的,该机器人使用了一个RGBD传感器,与不在地图预测区域上运行的控制器相比,该传感器能够在4米/秒的速度下显示出更好的性能。
打开封面
下载高清视频
观看高清视频
视频下载器
【ICRA2021】移动机器人 3D 三角形网格上的连续最短路径矢量场导航
【ICRA2021】CAROM - 道路基础设施单目相机的车辆定位和交通场景重建
概率机器人
机器人自助定位导航之路的探索
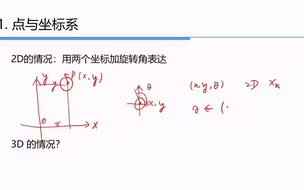
2-1 点与坐标系
【ICRA2021】轮式越野移动机器人的在线速度波动:一种强化学习方法
【ICRA2021】自动驾驶和地图学习的定制地标表示的自动建图
【ICRA2021】将基于人类风险的制动系统集成到露天移动机器人中
【ICRA2021】直接稀疏双目视觉-惯性全局里程计
【ICRA2021】基于递归神经网络的动态占用栅格地图
【第一视角POV】【法兰克福机场】Sky Line旅客捷运系统 一号客运大楼A/Z区→二号客运大楼D/E区
【ICRA2021】LaND: 从脱离事件中学习导航
【ICRA2021】3853-通过幻觉学习和清醒部署的敏捷机器人导航
【ICRA2021】基于实时3d激光雷达、毫米波雷达和GPS/IMU融合的非结构化环境下车辆检测与跟踪
【百度自动驾驶技术系列课程】自动驾驶核心模块精讲
【ICRA2021】基于点云的城市尺度场景变化检测
【ICRA2021】在线校准的高效多传感器辅助惯性导航
【ICRA2021】基于预测不确定性的深度多视图深度估计
【ICRA2021】使用快速可见树的实时机器人路径规划
ROS控制 | 第一轮控制功能包讲解
【ICRA2021】通过地图建模对自动驾驶车辆进行路线覆盖测试
【ICRA2021】用于机器人视觉和语言导航的分层跨模态代理
可视化:RVIZ,机器人仿真,ROS2
【ICRA2021】双足运动控制接触点角动量的一步超前预测:在受 LIP 启发的控制器中的验证
【ICRA2021】LIRO:紧耦合激光雷达惯性里程计
【ICRA2021】基于训练数据自动生成的动态对象感知 LiDAR SLAM
【ICRA2021】3794-学习使用各种LiDAR配置进行无地图导航:一种基于支持点的方法
FSD V12.5.4测评 ASS(增强智能召唤)
【ICRA2021】动能缓冲器避障
【ICRA2021】4028-移动机器人全局-局部耦合两阶段路径规划方法
Moveit!
为什么需要多传感器融合
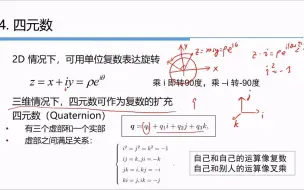
2-4 四元数
【ICRA2021】高效且强大的基于 LiDAR 的端到端导航
tf变换&导航
有缘人见(上)
基于ROS2的树莓派自主定位与导航小车
DOM-60 为机器人带来前所未有的感知能力
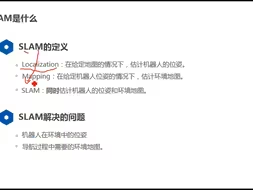
SLAM为什么需要IMU
【ICRA2021】用于在不确定性下自主探索建图的零样本强化学习