V
主页
京东 11.11 红包
2-1 点与坐标系
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
2-2 旋转矩阵
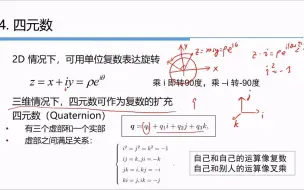
2-4 四元数
1-4 Linux下的C++基础
【ICRA2021】3475-OV2SLAM:用于实时应用的完全在线和通用的视觉SLAM
基于ROS2的树莓派自主定位与导航小车
有缘人见(上)
【ICRA2021】3508-ERASOR:一种基于栅格占据情况之差异的动态物体过滤方法
【ICRA2021】自动驾驶汽车的轻量级语义网格建图
【华南农业大学】激光视觉惯性SLAM建图 - 经济管理学院院楼
【ICRA2021】3647-使用相对深度先验的偏振单目稠密建图
强推!【视觉SLAM十四讲】全书讲解!清华大学原著大佬高翔亲授!真的让人醍醐灌顶!——(人工智能、深度学习、神经网络、Pytorch、OpenAI开发者大会)
【SLAM】LoopSplats:通过直接的3DGS注册,实现密集建图和在线回环检测的全局一致性图优化
华山区大范围激光视觉惯性SLAM建图
【ICRA2021】TT-SLAM:用于平面环境的密集单目 SLAM
Talk | 香港科技大学黄华健:高写实三维数字化时代下的在线同时定位和建图
视觉惯导融合SLAM内外参标定是关键
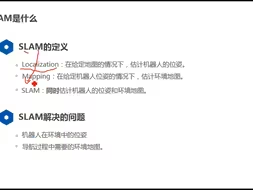
SLAM为什么需要IMU
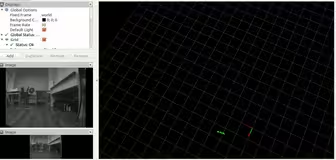
【ICRA2021】UVIP:用于复杂室内环境的强大的 UWB 辅助视觉惯性定位系统
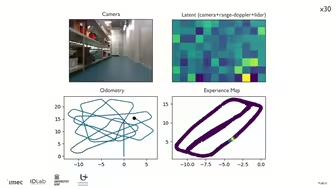
【ICRA2021】LatentSLAM:用于定位和建图的无监督多传感器表示学习
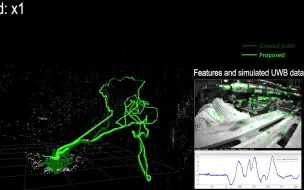
【ICRA2020】紧耦合单锚超宽带辅助单目视觉里程计
3738-来自两个UAV的分布式可变基线双目SLAM
颠覆你的认知!先开枪再瞄准真的错误吗?让赋能玩家来教你!【无畏契约进阶教学#3】
【ICRA2021】3505-MOLTR:单目RGB视频的多目标定位、跟踪和重建
【浙大谭平】从相机标定到视觉SLAM
火星上的SLAM 非结构环境中的飞行器建图和定位 太空机器人
高翔-大规模点云地图的自动化构建
LARVIO在数据集上的表现
【ICRA2021】大规模环境下基于语义直方图的图形匹配实时多机器人全局定位
【ICRA2020】基于视觉车道标记和拓扑地图匹配的车辆定位
ChainSLAM实时建图演示
除了激光SLAM和视觉SLAM还有哪些研究方向
【ICRA2020】在极端变化的条件下学习基于形状的视觉定位
【ICRA2020】基于分层四叉树特征光流跟踪的稀疏位姿图视觉惯性SLAM
【ICRA2021】自动驾驶和地图学习的定制地标表示的自动建图
【ICRA2021】3485-R-LOAM:利用已知三维参考对象的点到网格特征改进激光雷达里程计建图
SLAM为什么需要闭环检测
【ICRA2021】紧密耦合激光雷达视觉惯性里程表的统一多模态地标跟踪
【ICRA2021】用于自动代客泊车的基于混合鸟瞰边缘的语义视觉 SLAM
机器学习与SLAM怎么结合
【ICRA2021】基于预测不确定性的深度多视图深度估计